4.0 RoboCar
[MezData-Links: RoboCar] [www.pollin.de/productdownloads/D811116B.PDF 🔗]
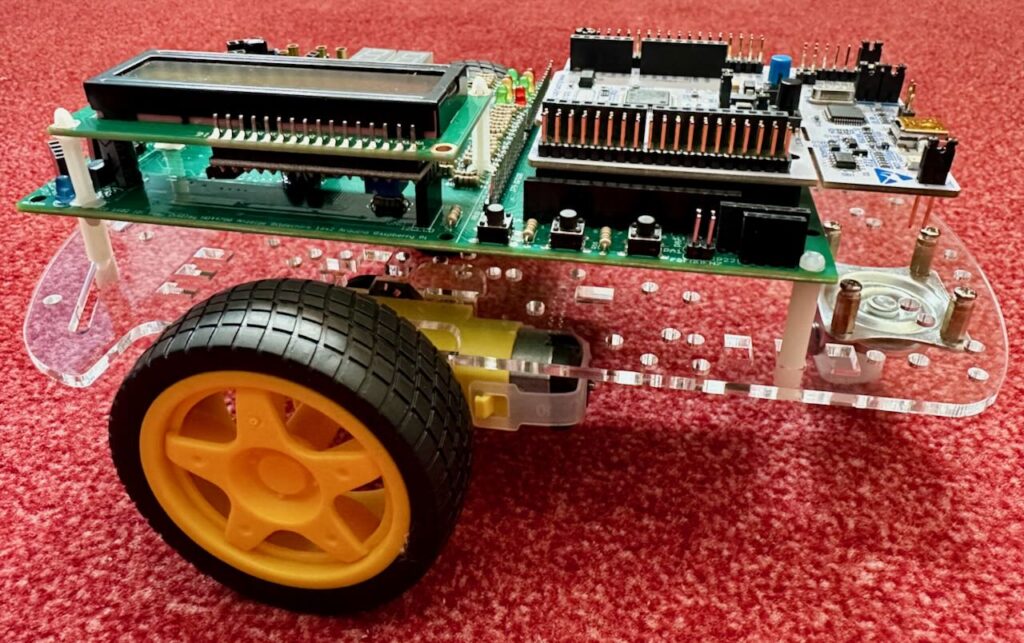
Bei Pollin gab es für kleines Geld einen Bausatz für ein Roboter Auto. Dank umfangreichen Befestigungsmaterial konnte die Sturm-Platine darauf befestigt werden.
Beim Test ist mir ein recht hoher Stromverbrauch in Ruhe von 160mA aufgefallen, das saugt die Batterien leer! Die Hauptursache sind die L293D-Chips für den Antrieb, allein der Logikteil verbraucht pro Chip typisch 35 mA nach Datenblatt, stimmt auch mit meiner Messung eines blanken Sturm-Bords überein: 70 mA. Das LCD braucht ca. 30 mA und der L152 ca. 50 mA. Das Car funktioniert auch mit NiMH Akkus.
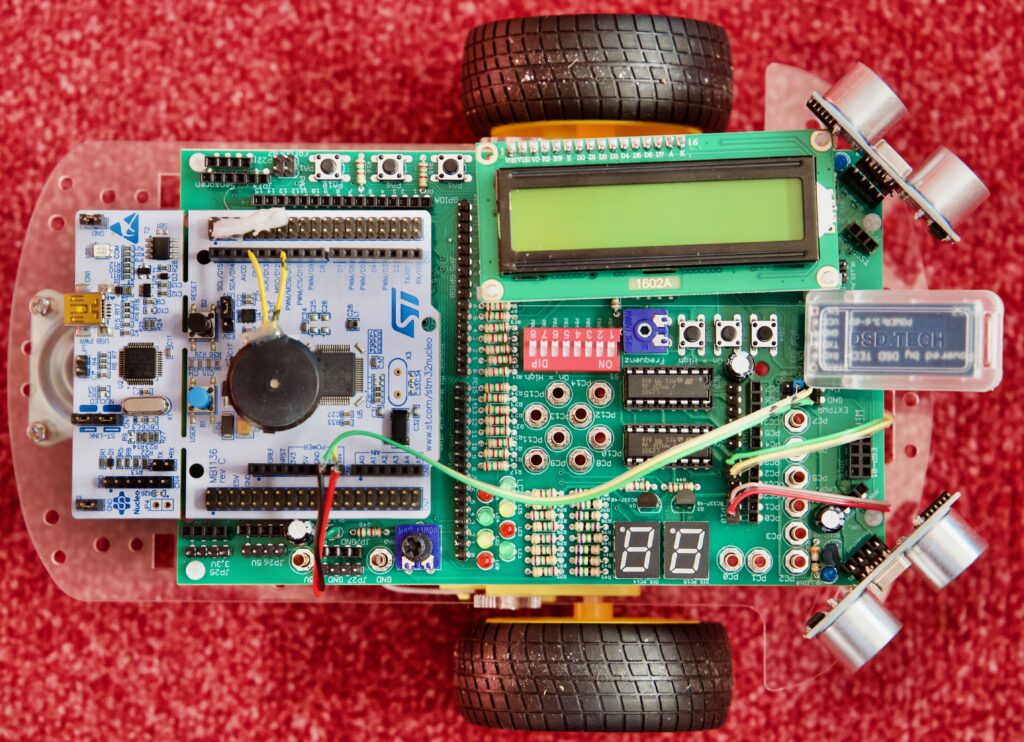
Die Motoren werden über einen L293D gesteuert. Ruhestrom des Logikteils 35 mA!
Test Software
// Anschluss an Sturm-Board
#include <SoftwareSerial.h> // Wir verwenden Software Serial
#define BTRX PB11
#define BTTX PB10
#define LED D13
SoftwareSerial SerialBT(BTRX, BTTX);
void setup() {
Serial.begin(115200); // über Pins D0, D1 (sind auf Board aber abgeklemmt)
SerialBT.begin(9600); // über Pins PB11, PB10
Serial.println("Bluetooth-Verbindung...");
delay(100);
pinMode(LED, OUTPUT);
pinMode(PC0,OUTPUT);
pinMode(PC1,OUTPUT);
pinMode(PC2,OUTPUT);
pinMode(PC3,OUTPUT);
//digitalWrite(PB12,LOW); // HC05 Einschalten
// Name ändern mit AT-Kommandos:
//BLE_AT_Name();
Serial.println("Ende Setup");
}
void loop() {
if (SerialBT.available()){ // Daten liegen an
byte c = SerialBT.read();
Serial.println(c);
switch (c){
case 'F':
digitalWrite(LED, HIGH);
GPIOC->ODR=0b0101;
break;
case 'B':
digitalWrite(LED, HIGH);
GPIOC->ODR=0b1010;
break;
case 'L':
digitalWrite(LED, HIGH);
GPIOC->ODR=0b1001;
break;
case 'R':
digitalWrite(LED, HIGH);
GPIOC->ODR=0b0110;
break;
case 'X':
GPIOC->ODR=0;
digitalWrite(LED, LOW);
break;
}
}
}Vorläufige Einschätzung
Das Teil fährt nicht gerade, die L293 saufen zu viel Strom für Batteriebetrieb, PWM geht nur per Software oder mit Drahtbrücken. Es sind zwar Ausschnitte für Lichtschranken der Lochräder vorhanden, habe bislang noch keine richtig passenden Lichtschranken-Module entdeckt. Die Ultraschallsensoren 45° an zu bringen ist nicht sinnvoll, besser ein Sensor mit Servo beweglich oder positionsabhängige Reflexlichtschranke.