1.5 ⏲ Timer
Dank der STM32-Arduino HardwareTimer library wird man von den nicht ganz einfachen Details der STM32 Timer zunächst verschont.
Info: In der MBED-Umgebung könnte das so aussehen: Ticker Dort wird mit Threads gearbeitet, die schlafen gelegt werden, erinnert mich an Java..
Hier nun der Weg mit STM32-Arduino. (Unterschied zu Atmel-AVR bei Register Compare, hier kein +1 zu Compareregister bei Zeitberechnung, Rücksetzen und ISR-Aufruf erfolgt offensichtlich sofort bei Erreichen des Vergleichswerts, nicht erst mit dem nächsten Systemtakt).
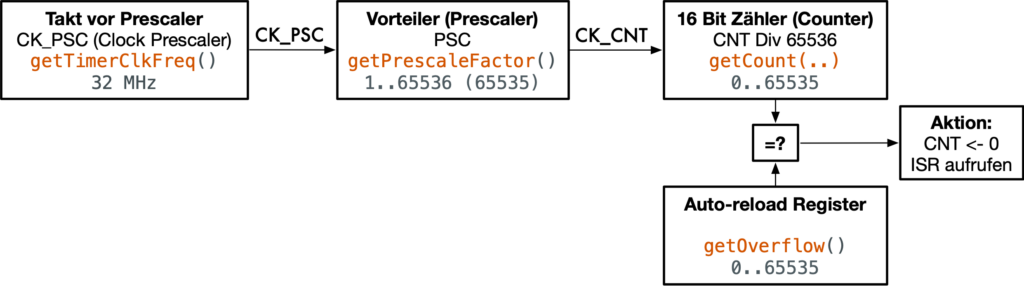
Ein Timer ist ein feines Stück eingebauter Hardware in einem Mikrocontroller, nach einer einstellbaren Zeit kann er z.B. einen Interrupt auslösen. Als Zeitbasis braucht er einen Timer-Takt (CK_PSC), hier sind es 32 MHz (andere Taktquellen sind einstellbar). Um z.B. jede Sekunde einen Interrupt auslösen zu können bräuchte man einen Zähler der bis 32 Millionen zählt (wie viele Bit müsste der haben?). Statt dessen werden ein Vorteiler (Prescaler) mit 16 Bit und ein 16 Bit Zähler (CTR DIV 65536) kombiniert, die einstellbaren Werte der Hardware-Register für beide können daher 65535 nicht überschreiten. Der Prescaler (Vorteiler) teilt den Timertakt mit einem einstellbaren Faktor (1..65536) (PSC-Registerwert 0..65535) und mit diesem langsameren Takt zählt ein Zähler bis zu einem vorgegebenen Wert im Auto-Reload Register ARR. Beim Erreichen des ARR-Wertes wird der Zähler wieder auf 0 gesetzt und ein Timer-Interrupt kann auslöst werden. In der STM32-API wird dafür die Bezeichnung Overflow eingeführt:
$ ARR = Overflow-1 $
Beispiel: Overflow hat den Wert 2, es wird ARR auf 1 gesetzt. Das bewirkt beim Erreichen des Zählerwertes 1 ein Zurückstellen auf 0 und das Setzen eines Interrupt-Flags. Zwei Zählertakte sind dabei vergangen. Overflow gibt also die Anzahl der Zählertakte bis zum Zurücksetzen an. Ein Overflowwert von 1 (ARR=0) scheint allerdings nicht zu funktionieren.
AVR-Bemerkung: Funktioniert wie CTC.
Es gibt 3 Varianten um den Timer mit setOverflow() ein zu stellen:
- Ticks: z.B. setOverflow(10000, TICK_FORMAT); nach 10000 Zählertakten wird ISR ausgelöst, dazu muss auch der Prescaler gesetzt werden..
- Hertz: z.B. setOverflow(10000, HERTZ_FORMAT); die ISR wird mit 10kHz also alle 100µs ausgelöst, der Prescaler wird automatisch eingestellt.
- µs: z.B. setOverflow(10000, MICROSEC_FORMAT); nach 10000µs=10ms wird ISR auslöst, der Prescaler wird automatisch eingestellt.
TICK_FORMAT ausprobieren und berechnen
Beim TICK_FORMAT müssen Prescaler und Overflow-Wert des Zählers selber eingestellt werden. Ich habe die zu erwartende Frequenz an der LED berechnet und mit diesem Beispielcode einige Messungen durchgeführt.
#define LED_B PA5 // D13 Led auf dem Board
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timeruaswahl
void isr_blinken(){
digitalWrite(LED_B,!digitalRead(LED_B)); // LED invertieren
}
void setup() {
pinMode(LED_B,OUTPUT); // BoardLED
mytimer.setOverflow(100, TICK_FORMAT); // 2..65535
mytimer.setPrescaleFactor(32000); // 1..65535
mytimer.attachInterrupt(isr_blinken); //Timer IR aktivieren und Sprung zur ISR// put your setup code here, to run once:
mytimer.resume();
}
void loop() {
}$ Frequenz_{LED} = Frequenz_{TimerCLK} / PreFaktor / Overflow / 2 = 32 * 10^6 Hz / 32000 / 100 / 2 = 5 Hz $
| TimerCLK | Prescaler | Overflow | Frequenz berechnet | Frequenz gemessen |
|---|---|---|---|---|
| 32 MHz | 32000 | 100 | 5 Hz | 5 Hz |
| 32 MHz | 32000 | 10 | 50 Hz | 50 Hz |
| 32 MHz | 32000 | 2 | 250 Hz | 250 Hz |
| 32 MHz | 32000 | 1 | 500 Hz | Kein Signal! |
| 32 MHz | 65535 | 2 | 122,07 Hz | 122,07 Hz |
| 32 MHz | 65536 | 2 | 122,07 Hz | 122,07 Hz |
| 32 MHz | 65535 | 3 | 81,38 Hz | 81,38 Hz |
| 32 MHz | 1 | 65535 | 244,14 Hz | 244,14 Hz |
| 32 MHz | 1 | 65536 | 244,14 Hz | 244,14 Hz |
| 32 MHz | 1 | 100 | 160 kHz | 48,8 kHz (ISR kam nicht hinterher) |
🖥 Erstellen Sie eine Tabellenkalkulation für die Berechnung der Frequenzen.
✍️ Die LED soll nun mit 0,5 Hz blinken, 1 s an und 1 s aus. Ermitteln Sie passende Werte für Prescaler und Overflow.
Die Erfindung der Taktzahl
Die Timer-ISR soll alle 10 ms aufgerufen werden, ermittle passende Werte für Prescaler und Overflow.
$ Zeit_{ISR} = Prescaler * Overflow / TimerCLK $
$ \Leftrightarrow Zeit_{ISR} * TimerCLK = Prescaler * Overflow = \textbf{Taktzahl} $
Letztlich werden Takte gezählt und die Anzahl der Takte auf Prescaler und Overflow geschickt verteilt.
$ \textbf{Taktzahl} = Zeit_{ISR} * TimerCLK $
$ \textbf{Taktzahl} = Prescaler * Overflow $
Berechnen wir die Zahl der zu zählenden Takte:
$ \textbf{Taktzahl} = 10 ms * 32 MHz = 10 *10^{-3} s * 32 * 10^6 Hz = 320 * 10^3 = 320.000 $
Nun die Qual der Wahl: Welche Kombination von Prescaler und Overflow die 320.000 als Produkt ergibt sollen wir nun wählen? Zeit um sich die beiden anderen Timer-Formate an zu sehen!
Einfach mit Hertz
Hier ein Testprogramm um das Hertz-Format zu erkunden, dabei wird Prescaler und Overflow passend eingestellt. isr_blinken() wird am Anfang jede Sekunde aufgerufen. Durch Druck auf den UserButton verdoppelt sich die Frequenz und die eingestellten Werte werden angezeigt.
#define LED_B PA5 // D13 Led auf dem Board
#define T_B PC13 // Entpreller UserButton auf dem Board
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timerauswahl
int isrFrequenz = 1;
void isr_blinken(){
digitalWrite(LED_B,!digitalRead(LED_B));
}
void isr_gedruecktT_B(){ // Interrupt Service Routine
isrFrequenz*=2;
stelleTimer();
}
void stelleTimer(){ // Timer einstellen und Werte anzeigen
mytimer.setOverflow(isrFrequenz, HERTZ_FORMAT);
Serial.printf("ISR-Freq.: %3d Sytemtakt %d Prescaler %5d Overflow %5d \n", isrFrequenz,mytimer.getTimerClkFreq(),mytimer.getPrescaleFactor(),mytimer.getOverflow());
}
void setup() {
Serial.begin (115200); //Serielle kommunikation starten
pinMode(LED_B,OUTPUT); // BoardLED
stelleTimer();
mytimer.attachInterrupt(isr_blinken); // Timer ISR einstellen
mytimer.resume(); // Timer aktivieren
pinMode(T_B,INPUT);
attachInterrupt (digitalPinToInterrupt (T_B), isr_gedruecktT_B, FALLING);
}
void loop() {
}ISR-Freq.: 1 Hz TimerCLK: 32 MHz Prescaler: 489 Overflow: 65439 ISR-Freq.: 2 Hz TimerCLK: 32 MHz Prescaler: 245 Overflow: 65306 ISR-Freq.: 4 Hz TimerCLK: 32 MHz Prescaler: 123 Overflow: 65040 ISR-Freq.: 8 Hz TimerCLK: 32 MHz Prescaler: 62 Overflow: 64516
Es fällt auf, dass der Prescaler möglichst klein und der Overflow möglichst groß gewählt wurde. Diese Strategie ist geschickt, wenn damit Pulsweitenmodulation (PWM) oder Zeitmessung mit dem Zähler gemacht werden sollen. Je größer der Prescaler, desto größer sind die Zeithäppchen, die der Zähler bekommt und desto ungenauer lässt sich mit Overflow die Zeit damit einstellen. Also möglichst kleine Zeithäppchen -> Prescaler minimal.
$ \textbf{Prescaler} = Taktzahl / 65536 = 32 * 10^6 / 65536 = 488,28 $
Einfach Runden ist keine gute Idee, denn dann wären die Zeithäppchen hier zu klein, es müssten zu viele davon gezählt werden:
$ \textbf{Overflow} = Taktzahl / Prescaler = 32 * 10^6 / 488 = 65573 > 65535 ! $
Hier also Aufrunden auf 489.
$ \textbf{Overflow} = Taktzahl / Prescaler = 32 * 10^6 / 489 = 65439,67 < 65535 ! $
Auf welchen Wert Overflow einstellen? Ich würde runden, allerdings scheint die API an dieser Stelle bei Hertz- und Mikrosekunden-Format abzurunden, es wird mit Integer gerechnet. Probe machen:
$ \textbf{FreqISR} = TimerCLK / Prescaler / Overflow = \frac{32 MHz} {489 * 65439} = \frac{32 MHz} {31999671} = 1,00001 Hz $
$ \textbf{ZeitISR} = Prescaler * Overflow / TimerCLK = \frac{489 * 65439} {32 MHz} = 0,99998 s $
🖥 Erstellen Sie eine Tabellenkalkulation zur Berechnung der Werte.

MICROSEC_FORMAT
#define LED_B PA5 // D13 Led auf dem Board
#define T_B PC13 // Entpreller UserButton auf dem Board
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timerauswahl
int isrMicrosec = 10000;
void isr_blinken(){
digitalWrite(LED_B,!digitalRead(LED_B));
}
void isr_gedruecktT_B(){ // Interrupt Service Routine
isrMicrosec*=2;
stelleTimer();
}
void stelleTimer(){ // Timer einstellen und Werte anzeigen
mytimer.setOverflow(isrMicrosec, MICROSEC_FORMAT);
Serial.printf("Zeit-ISR: %8d us TimerCLK: %d MHz Prescaler: %5d Overflow: %5d\n",isrMicrosec,mytimer.getTimerClkFreq()/1000000,mytimer.getPrescaleFactor(),mytimer.getOverflow());
}
void setup() {
Serial.begin (115200); //Serielle kommunikation starten
pinMode(LED_B,OUTPUT); // BoardLED
stelleTimer();
mytimer.attachInterrupt(isr_blinken); // Timer ISR einstellen
mytimer.resume(); // Timer aktivieren
pinMode(T_B,INPUT);
attachInterrupt (digitalPinToInterrupt (T_B), isr_gedruecktT_B, FALLING);
}
void loop() {
}Zeit-ISR: 10000 us TimerCLK: 32 MHz Prescaler: 5 Overflow: 64000 Zeit-ISR: 20000 us TimerCLK: 32 MHz Prescaler: 10 Overflow: 64000 Zeit-ISR: 40000 us TimerCLK: 32 MHz Prescaler: 20 Overflow: 64000 Zeit-ISR: 80000 us TimerCLK: 32 MHz Prescaler: 40 Overflow: 64000 Zeit-ISR: 160000 us TimerCLK: 32 MHz Prescaler: 79 Overflow: 64810 Zeit-ISR: 320000 us TimerCLK: 32 MHz Prescaler: 157 Overflow: 65222 Zeit-ISR: 640000 us TimerCLK: 32 MHz Prescaler: 313 Overflow: 65431 Zeit-ISR: 1280000 us TimerCLK: 32 MHz Prescaler: 626 Overflow: 65431 Zeit-ISR: 2560000 us TimerCLK: 32 MHz Prescaler: 1251 Overflow: 65483 Zeit-ISR: 5120000 us TimerCLK: 32 MHz Prescaler: 2501 Overflow: 65509 Zeit-ISR: 10240000 us TimerCLK: 32 MHz Prescaler: 5001 Overflow: 65522
Wie wird jetzt Prescaler und Overflow berechnet? Erstellen Sie eine Tabellenkalkulation. Werden die Werte von setOverflow() optimal berechnet?
🛤️ Gleisanlage (HP16-1)
![Gleisanlage [Bild von Matthias Kohler]](https://mezmedia.de/wp-content/uploads/Ti3-Ard-1520-Gleissteuerung.jpg)
Für den Bahnhof einer Modellbahnanlage soll eine Steuerung entworfen werden. Der Bahnhof besitzt 6 Gleise. Diese Gleise werden über die Weichen W0 (PC0) bis W4 (PC4) angefahren. Eine Lichtschranke LS (PC13) erfasst vor der ersten Weiche die einfahrenden Züge. Die Züge werden zyklisch aufsteigend (nach Gleis 5 wieder auf Gleis 0) auf die 6 Gleise des Bahnhofs verteilt. (Auffahrunfälle werden durch die hier nicht betrachtete Signalanlage verhindert). Die gelben Zahlen geben die Stellung der Weichen an. Bei einer 0 fährt der Zug nach “oben”, bei einer 1 nach “unten”. Nach dem Start befindet sich das Programm im “Automatikmodus” bei dem alle 5 Sekunden isr_5sekunden() ein Gleis durch wechsleGleis() zyklisch weitergeschaltet wird. In einem zweiten Modus “Interruptbetrieb” werden die Gleise bei Unterbrechung der Lichtschranke durch isr_lichtschranke() weiter geschaltet. Der Wechsel zwischen den beiden Modi geschieht mit isr_moduswechsel() die bei Druck auf Taste PA1 ausgelöst wird. Folgender Quellcode ist gegeben:
enum {AUTOMATIKMODUS,INTERRUPTBETRIEB} zustand=AUTOMATIKMODUS;
volatile int gleis = 0; // wird in ISR verändert daher volatile
const int fahrstrasse[] = {0b00000, 0b10000, 0b00001, 0b10001, 0b00011, 0b00111};
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timeruaswahl
# define LICHTSCHRANKE PC13 // Entpreller lowaktiver UserButton auf dem Board
# define MODUSWECHSEL PA1 // Nicht entprellter highaktiver Taster
void wechsleGleis(){ // gleis eins weiter schalten: 0,1,2,3,4,5->0,1...
}
void isr_lichtschranke(){ // im INTERRUPTBETRIEB Gleis weiterschalten
}
void isr_moduswechsel(){ // zwischen AUTOMATIKMODUS und INTERRUPTBETRIEB wechseln
}
void isr_5sekunden(){ // im AUTOMATIKMODUS Gleis weiter schalten
}
void setup() {
pinMode(PC0, OUTPUT); // ohne diese Zeile klappts nicht mit MODER
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(LICHTSCHRANKE, INPUT); // nicht notwendig?
pinMode(MODUSWECHSEL, INPUT_PULLDOWN); // notwendig wegen PullDown einschalten
}
void loop() {
}Erstellen Sie ein Zustandsdiagramm.
Lösungsvorschlag Zustandsdiagramm

Vervollständigen Sie den Quellcode für:
- wechsleGleis() die Variable gleis wird zum nächsten Gleis weitergeschaltet und die Weichen gestellt.
- setup() Timer-ISR für 5 Sekunden einstellen, ISRs für Lichtschranke und Moduswechsel (Entprellen nicht notwendig).
- ISR_lichtschranke(), ISR_moduswechsel(), ISR_5sekunden()
Lösungsvorschlag Quellcode
enum {AUTOMATIKMODUS,INTERRUPTBETRIEB} zustand=AUTOMATIKMODUS;
volatile int gleis = 0; // wird in ISR verändert daher volatile
const int fahrstrasse[] = {0b00000, 0b10000, 0b00001, 0b10001, 0b00011, 0b00111};
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timeruaswahl
# define LICHTSCHRANKE PC13 // Entpreller lowaktiver UserButton auf dem Board
# define MODUSWECHSEL PA1 // Nicht entprellter highaktiver Taster
void wechsleGleis(){ // gleis eins weiter schalten: 0,1,2,3,4,5->0,1...
gleis = (gleis + 1) % 6;
GPIOC->ODR = fahrstrasse[gleis];
}
void isr_lichtschranke(){ // im INTERRUPTBETRIEB Gleis weiterschalten
switch(zustand){
case INTERRUPTBETRIEB:
wechsleGleis();
break;
}
}
void isr_moduswechsel(){ // zwischen AUTOMATIKMODUS und INTERRUPTBETRIEB wechseln
switch(zustand){
case AUTOMATIKMODUS:
zustand = INTERRUPTBETRIEB;
break;
case INTERRUPTBETRIEB:
zustand = AUTOMATIKMODUS;
break;
}
}
void isr_5sekunden(){ // im AUTOMATIKMODUS Gleis weiter schalten
switch(zustand){
case AUTOMATIKMODUS:
wechsleGleis();
break;
}
}
void setup() {
pinMode(PC0, OUTPUT); // ohne diese Zeile klappts nicht
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(LICHTSCHRANKE, INPUT);
pinMode(MODUSWECHSEL, INPUT_PULLDOWN); // Start
attachInterrupt (digitalPinToInterrupt (LICHTSCHRANKE), isr_lichtschranke, FALLING);
attachInterrupt (digitalPinToInterrupt (MODUSWECHSEL), isr_moduswechsel, RISING);
mytimer.setOverflow(5000000, MICROSEC_FORMAT); // 5 sec = 5 000 000 µs
mytimer.attachInterrupt(isr_5sekunden); //Timer IR aktivieren und Sprung zur ISR
mytimer.resume(); //Timer starten
}
void loop() {
}Zusatzaufgabe: Im Automatikbetrieb soll nur noch 3 Mal jedes Gleis geschaltet und dann in den Interruptbetrieb gewechselt werden. Beim Moduswechsel in den Automatikbetrieb wird der Gleiswechselzähler wieder auf 0 gesetzt. Entwerfen Sie Zustandsdiagramm und Quellcode.
Lösungsvorschlag Zustandsdiagramm

Lösungsvorschlag Quellcode kompatibel mit PlatformIO
#include <Arduino.h>
enum zustandstyp {AUTOMATIKMODUS,INTERRUPTBETRIEB};
zustandstyp zustand=AUTOMATIKMODUS;
volatile int gleis = 0; // wird in ISR verändert daher volatile
int gleiswechsel=0; // scheint ohne volatile zu funktionieren
const int fahrstrasse[] = {0b00000, 0b10000, 0b00001, 0b10001, 0b00011, 0b00111};
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timeruaswahl
# define LICHTSCHRANKE PC13 // Entpreller lowaktiver UserButton auf dem Board
# define MODUSWECHSEL PA1 // Nicht entprellter highaktiver Taster
void wechsleGleis(){ // gleis eins weiter schalten: 0,1,2,3,4,5->0,1...
gleis = (gleis + 1) % 6;
GPIOC->ODR = fahrstrasse[gleis];
}
void isr_lichtschranke(){ // im INTERRUPTBETRIEB Gleis weiterschalten
switch(zustand){
case INTERRUPTBETRIEB:
wechsleGleis();
break;
}
}
void isr_moduswechsel(){ // zwischen AUTOMATIKMODUS und INTERRUPTBETRIEB wechseln
switch(zustand){
case AUTOMATIKMODUS:
zustand = INTERRUPTBETRIEB;
break;
case INTERRUPTBETRIEB:
gleiswechsel=0;
zustand = AUTOMATIKMODUS;
break;
}
}
void isr_5sekunden(){ // im AUTOMATIKMODUS Gleis weiter schalten
switch(zustand){
case AUTOMATIKMODUS:
if(gleiswechsel>=18){
zustand=INTERRUPTBETRIEB;
}
else{
wechsleGleis();
gleiswechsel++;
}
break;
}
}
void setup() {
pinMode(PC0, OUTPUT); // ohne diese Zeile klappts nicht
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(LICHTSCHRANKE, INPUT);
pinMode(MODUSWECHSEL, INPUT_PULLDOWN); // Start
attachInterrupt (digitalPinToInterrupt (LICHTSCHRANKE), isr_lichtschranke, FALLING);
attachInterrupt (digitalPinToInterrupt (MODUSWECHSEL), isr_moduswechsel, RISING);
mytimer.setOverflow(5000000, MICROSEC_FORMAT); // 5 sec = 5 000 000 µs
mytimer.attachInterrupt(isr_5sekunden); //Timer IR aktivieren und Sprung zur ISR
mytimer.resume(); //Timer starten
}
void loop() {
}🐤 Bei Dir piepts wohl? Tonausgabe mit PWM!
Ein Piezo-Lautsprecher soll einen Ton mit Frequenz f = 440 Hz ausgeben. Er ist zwischen GND und PA7/D11 angeschlossen. Am Pin wird dazu ein Rechtecksignal erzeugt. Wie lange ist die Periodendauer T des Signals? Wie lange ist der Pin 1 bzw. 0?
$ T = \frac{1}{f}= \frac{1}{440Hz} = 2.27 ms $
So könnte das realisiert werden:
- Mit delay()? Zu grob
- delayMicroseconds()!
Erstellen Sie zur Übung ein Programm.. - Mit Timer-ISR
Erstellen Sie zur Übung ein Programm.. - micros()
Erstellen Sie zur Übung ein Programm.. - Mit Timer-PWM Hardware
PulsWeitenModulation (PWM) haben Sie schon bei Analog-Ausgabe kennengelernt. An bestimmten Pins des µC können von der Timer-Hardware Signale ausgegeben werden. Dadurch muss sich nicht die CPU darum kümmern. So funktioniert es prinzipiell:
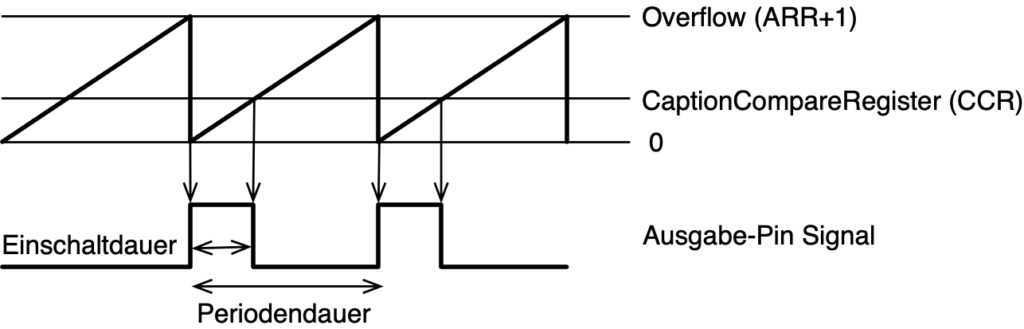
Den Timer bis zu einem Wert Overflow zählen lassen und dann wieder auf 0 springen, wie beim Interrupt. Der Overflow-Wert gibt die Periodendauer vor. Beim Sprung auf 0 den Ausgabe-Pin auf 1 schalten. Ein Vergleichsregister das CaptionCompareRegister (CRR) gibt den Wert vor bei dem der Ausgabe-Pin wieder auf 0 geschaltet wird, es gibt die Einschaltdauer, Impulsdauer vor. Das Verhältnis der Impulsdauer zur Periodendauer ist der Tastgrad (engl. dutycycle). 50% dutycycle bedeutet 50% der Zeit ist der Ausgabepin 1 50% 0.
Der Lautsprecher sei an PA7/D11 angeschlossen. Welcher Timer und welcher Kanal kommt dafür in Frage? Gewählt: TIM3_CH2. In der HardwareTimer library nachschauen wie das geht und ordentliches Testprogramm schreiben:
#include <Arduino.h>
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
# define USER_BTN PC13 // Entpreller lowaktiver UserButton auf dem Board
# define PIEZO_PIN PA7 // Lautsprecher an PA7/D11 -> TIM3_CH2
# define KANAL 2 // CH2
int einschaltdauer = 50;// 50% dutycycle halbe Zeit an halbe aus
int frequenz = 440; // 440 Hz
void ausgebenTimerWerte(){
Serial.printf("Prescaler %5d Overflow %5d Compare %5d\n",mytimer.getPrescaleFactor(),mytimer.getOverflow(),mytimer.getCaptureCompare(KANAL));
}
void isr_userB(){ // Werte verändern und testen
frequenz+=10;
mytimer.setPWM(KANAL, PIEZO_PIN, frequenz, einschaltdauer);
ausgebenTimerWerte();
}
void setup() {
Serial.begin (9600); //Serielle Kommunikation starten
pinMode(USER_BTN, INPUT);
attachInterrupt (digitalPinToInterrupt (USER_BTN), isr_userB, FALLING);
mytimer.setPWM(KANAL, PIEZO_PIN, frequenz, einschaltdauer);
ausgebenTimerWerte();
}
void loop() {
}Nach Programmstart piepst es und am seriellen Monitor wird das ausgegeben:
Prescaler 2 Overflow 35555 Compare 17777
Prima, die API nimmt uns die Rechenarbeit ab.
Leider verstummt bei Druck auf den User-Button der Ton, ein zweiter Aufruf von setPWM() funktioniert nicht zum Verändern der Parameter. Hier der Quellcode der API-Methode:
void HardwareTimer::setPWM(uint32_t channel, PinName pin, uint32_t frequency, uint32_t dutycycle, callback_function_t PeriodCallback, callback_function_t CompareCallback)
{
setMode(channel, TIMER_OUTPUT_COMPARE_PWM1, pin);
setOverflow(frequency, HERTZ_FORMAT);
setCaptureCompare(channel, dutycycle, PERCENT_COMPARE_FORMAT);
if (PeriodCallback) {
attachInterrupt(PeriodCallback);
}
if (CompareCallback) {
attachInterrupt(channel, CompareCallback);
}
resume();
}Verantwortlich ist ein zweiter Aufruf der setMode()-Methode, also mit setOverflow() bzw. setCaptureCompare() die Werte in isr_userB() einzeln verändern:
void isr_userB(){ // Werte verändern und testen
frequenz+=10;
mytimer.setOverflow(frequenz,HERTZ_FORMAT); // Frequenz einstellen
mytimer.setCaptureCompare(KANAL,50,PERCENT_COMPARE_FORMAT); // Impulsbreite einstellen 0..100
ausgebenTimerWerte();
}PWM mit 0,1,99 und 100% ?
#include <Arduino.h>
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
# define USER_BTN PC13 // Entpreller lowaktiver UserButton auf dem Board
# define PIEZO_PIN PA7 // Lautsprecher an PA7/D11 -> TIM3_CH2
# define KANAL 2 // CH2
int prozent = 50;// 50% dutycycle halbe Zeit an halbe aus
int frequenz = 440; // 440 Hz
void ausgebenTimerWerte(){
Serial.printf("Prescaler %5d Overflow %5d Compare %5d\n",mytimer.getPrescaleFactor(),mytimer.getOverflow(),mytimer.getCaptureCompare(KANAL));
}
void isr_userB(){ // Werte verändern und testen
switch (prozent){
case 0: prozent=1; break;
case 1: prozent=99; break;
case 99: prozent=100; break;
default: prozent=0;
}
mytimer.setCaptureCompare(KANAL,prozent,PERCENT_COMPARE_FORMAT); // Impulsbreite einstellen
ausgebenTimerWerte();
}
void setup() {
Serial.begin (9600); //Serielle Kommunikation starten
pinMode(USER_BTN, INPUT);
attachInterrupt (digitalPinToInterrupt (USER_BTN), isr_userB, FALLING);
mytimer.setPWM(KANAL, PIEZO_PIN, frequenz, prozent);
ausgebenTimerWerte();
}
void loop() {
}Bei Impulsbreite 0% ist der PWM-Ausgang dauerhaft low, bei Impulsbreite 100% ist der PWM-Ausgang dauerhaft high. Betrachten Sie auch die Ausgaben auf dem Seriellen Monitor.
🦆 Alle meine Entchen spielen
Die Noten in eine Tonhöhe also Frequenz umsetzen. Hier eine mögliche Umsetzung [Gleichstufige Stimmung]:
| index | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 12 | 13 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ton | c’ | cis’ | d’ | es’ | e’ | f’ | fis’ | g’ | as’ | a’ | b’ | h’ | c” |
| Frequenz | 262 | 277 | 293 | 311 | 330 | 349 | 370 | 392 | 415 | 440 | 466 | 494 | 523 |
#include <Arduino.h>
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
#define USER_BTN PC13 // Entpreller lowaktiver UserButton auf dem Board
#define PIEZO_PIN PA7 // Lautsprecher an PA7/D11 -> TIM3_CH2
#define KANAL 2 // CH2
#define HUELLKURVE 0 // besserer Sound mit Hüllkurve
//const unsigned int ton[] ={264,275,297,317,330,352,367,396,422,440,475,495}; // Frequenzen
const unsigned int ton[] ={262,277,293,311,330,349,370,392,415,440,466,494}; // Frequenzen
const unsigned char kurve[] = {25,13,8,4,2,1,0}; // Huellkurve
const unsigned char melodie[] ={0,2,4,5,7,7,9,9,9,9,7,9,9,9,9,7,5,5,5,5,4,4,7,7,7,7,0}; // alle meine Entchen
const unsigned char lange[] ={2,2,2,2,4,4,2,2,2,2,4,2,2,2,2,4,2,2,2,2,4,4,2,2,2,2,4}; // Tonlaengen
void isr_userB(){ // Abschalten können!
static bool spielt = true;
if (spielt){
mytimer.pause();
spielt=false;
} else{
mytimer.resume();
spielt=true;
}
}
void setup() {
pinMode(USER_BTN, INPUT);
attachInterrupt (digitalPinToInterrupt (USER_BTN), isr_userB, FALLING);
mytimer.setPWM(KANAL, PIEZO_PIN, 440, 50); // Initialisierung mit 440 Hz
}
void loop() {
unsigned char d,i,j,l;
unsigned int k;
for (i=0;i<sizeof(melodie);i++){ // spiele die Melodie
k = ton[melodie[i]]; // hole die Frequenz
mytimer.setOverflow(k,HERTZ_FORMAT); // Frequenz einstellen
mytimer.setCaptureCompare(KANAL,50,PERCENT_COMPARE_FORMAT); // Signalbreite einstellen
delay(20);
#if HUELLKURVE == 1 // mit Hüllkurve
for(j=0;j<sizeof(kurve);j++){ // Huellkurve anwenden: Signalbreite schmäler
mytimer.setCaptureCompare(KANAL,kurve[j],PERCENT_COMPARE_FORMAT);
for (d=0;d<lange[i];d++){ // Tonlaenge
delay(20);
}
}
#else // ohne Hüllkurve
for (d=0;d<lange[i];d++){ // Tonlaenge
delay(100);
}
mytimer.setCaptureCompare(KANAL,0,PERCENT_COMPARE_FORMAT);
delay(80); // Pause bis naechster Ton
#endif
}
delay(300); // Pause bis Melodie wieder startet
}Mit Hüllkurve hört es sich besser an: #define HUELLKURVE 1 setzen.
Durch eine geringere Pulsbreite kann die Lautsprecherausgabe leiser werden..
Wie ich Sie kenne werden Sie nun begeistert mit neuen Melodien den Unterrichtsraum beglücken 😜.
🎸 Gitarrenstimmhilfe (HP15-2)
Zum Stimmen von Gitarren soll ein µC Referenzfrequenzen an PA7/D11 ausgeben. Das Signal entspricht den Tonfrequenzen der sechs Gitarrensaiten. In der Tabelle sind die Frequenzen und die Ausgaben auf der 7-Segment-LED-Anzeige aufgeführt.
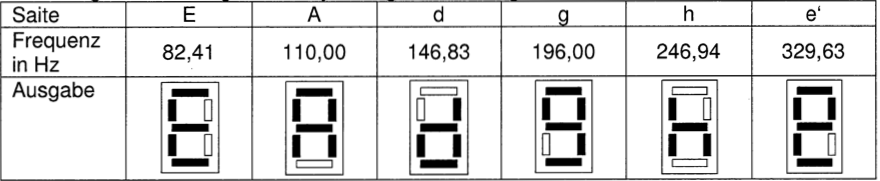
Die Tonauswahl soll über den prellfreien Low-aktiven Taster an PC13 erfolgen. Der Reset-Taster setzt die Stimmhilfe wieder zurück. Nach Einschalten/Reset wird kein Ton ausgegeben und in der 7 Segment Anzeige leuchtet “-“. Mit jedem Tastendruck auf PC13 wird der jeweils nächste Ton ausgewählt, dies geschieht mit einer ISR. Nach e’ soll die Auswahl wieder mit E beginnen:
(Ruhe->E->A->d->g->h->e’->E->…).
Töne genau erzeugen, Prescaler und und Overflow ermitteln
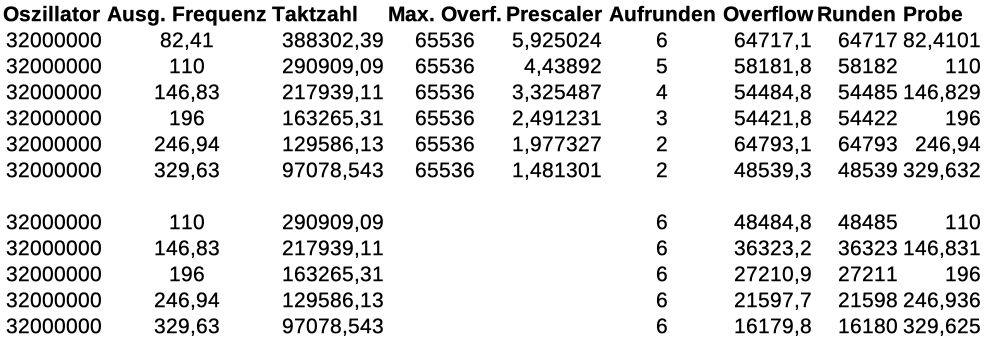
Viele Töne (E,d,h,e’) lassen sich nicht mit dem Herz-Format genau einstellen, da als Eingabe ganze Zahlen vorgesehen sind. Daher wird im Tick-Format Prescaler und Overflow verwendet. Hier eine Beispielrechnung wie die Werte ermittelt werden können:
- $ \textbf{Taktzahl} = TimerCLK / Tonfrequenz = 32MHz / 82,41Hz = 388302,39 $
- $ \textbf{Prescaler: } Taktzahl / MaxOverflow = {388302,39 / 65536} = 5,92 \textbf{ Aufrunden: 6} $
- $ \textbf{Overflow: } Taktzahl / Prescaler = 388302,39 / 6 = \textbf{64717} $
- $ \textbf{Probe: } TimerCLK / Prescaler / Overflow = 32MHz / 6 / 64717 = \textbf{82,41Hz} $
✍️ Ermitteln Sie die zu erwartenden Werte für Prescaler und Overflow für die anderen Frequenzen.
Tipp: 🖥 Verwenden Sie eine Tabellenkalkulation.
Der Prescaler-Wert ändert sich, es müssten zwei Felder verwendet werden um die Einstellungen zu speichern. Wie genau wären die Frequenzen, wenn der Prescaler-Wert von 82,41 Hz beibehalten und nur die Overflow-Werte geändert werden würden?
✍️ 🖥 Ermitteln Sie die Overflow-Werte für die Frequenzen und bestimmen Sie die Ausgabefrequenz.
Lösung
Werte für 7 Segmentanzeige bestimmen
Bestimmen sie die Werte für die Ausgabe auf der 7 Segmentanzeige, füllen Sie die Tabelle aus:
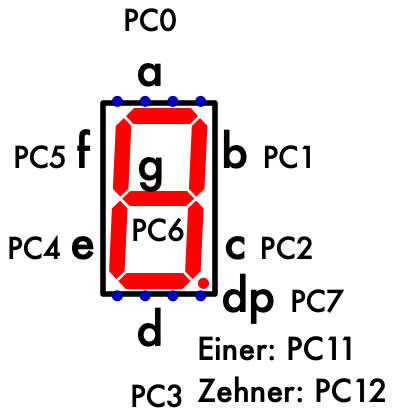
| Ausgabe | g PC6 | f PC5 | e PC4 | d PC3 | c PC2 | b PC1 | a PC0 | Hex |
|---|---|---|---|---|---|---|---|---|
| – | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0x40 |
| E | ||||||||
| A | ||||||||
| d | ||||||||
| g | ||||||||
| h | ||||||||
| e |
Lösung Umwandlung für 7-Segment Anzeige
| Ausgabe | g PC6 | f PC5 | e PC4 | d PC3 | c PC2 | b PC1 | a PC0 | Hex |
|---|---|---|---|---|---|---|---|---|
| – | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0x40 |
| E | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 0x79 |
| A | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 0x77 |
| d | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 0x5e |
| g | 1 | 1 | 0 | 1 | 1 | 1 | 1 | 0x6f |
| h | 1 | 1 | 1 | 0 | 1 | 0 | 0 | 0x74 |
| e | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 0x7b |
Code Vorgabe vervollständigen
#include <Arduino.h>
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
#define USER_BTN PC13 // Entpreller lowaktiver UserButton auf dem Board
#define PIEZO_PIN PA7 // Lautsprecher an PA7/D11 -> TIM3_CH2
#define KANAL 2 // CH2
const unsigned char anzeige[] ={...}; // 7Segmentausgaben für E..e
const unsigned int ton_overflow[] ={64717,...}; // Overflow-Werte für E..e
unsigned char ton=0;
void isr_userB(){ // nächsten Ton ausgeben
GPIOC->ODR = anzeige[ton]; // ton auf 7Seg. ausgeben
digitalWrite(PC11,HIGH); // Einer einschalten
mytimer.setOverflow(ton_overflow[ton], TICK_FORMAT); // Frequenz einstellen
mytimer.setCaptureCompare(KANAL,50,PERCENT_COMPARE_FORMAT); // Impulsbreite einstellen 0..100
mytimer.resume(); // Timer aktivieren
if (ton>=5) ton=0;
else ton++;
}
void setup() {
pinMode(PC0, OUTPUT); // ohne diese Zeile klappts nicht
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(PC11,OUTPUT); // Einer Ausgang
pinMode(USER_BTN, INPUT);
attachInterrupt (digitalPinToInterrupt (USER_BTN), isr_userB, FALLING);
GPIOC->ODR = 0x40; // - ausgeben
digitalWrite(PC11,HIGH); // Einer einschalten
mytimer.setPrescaleFactor(?); // Prescaler einstellen
mytimer.setMode(KANAL, TIMER_OUTPUT_COMPARE_PWM1, PIEZO_PIN); // Den PWM-Ausgang einstellen
}
void loop() {
}Lösungsvorschlag
#include <Arduino.h>
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
#define USER_BTN PC13 // Entpreller lowaktiver UserButton auf dem Board
#define PIEZO_PIN PA7 // Lautsprecher an PA7/D11 -> TIM3_CH2
#define KANAL 2 // CH2
const unsigned char anzeige[] ={0x79,0x77,0x5e,0x6f,0x74,0x7b}; // 7Segmentausgaben für E..e
const unsigned int ton_overflow[] ={64717,48485,36323,27211,21598,16180}; // Overflow-Werte für E..e
unsigned char ton=0;
void isr_userB(){ // nächsten Ton ausgeben
GPIOC->ODR = anzeige[ton]; // ton auf 7Seg. ausgeben
digitalWrite(PC11,HIGH); // Einer einschalten
mytimer.setOverflow(ton_overflow[ton], TICK_FORMAT); // Frequenz einstellen
mytimer.setCaptureCompare(KANAL,50,PERCENT_COMPARE_FORMAT); // Impulsbreite einstellen 0..100
mytimer.resume(); // Timer aktivieren
if (ton>=5) ton=0;
else ton++;
}
void setup() {
pinMode(PC0, OUTPUT); // ohne diese Zeile klappts nicht
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(PC11,OUTPUT); // Einer Ausgang
pinMode(USER_BTN, INPUT);
attachInterrupt (digitalPinToInterrupt (USER_BTN), isr_userB, FALLING);
GPIOC->ODR = 0x40; // - ausgeben
digitalWrite(PC11,HIGH); // Einer einschalten
mytimer.setPrescaleFactor(6); // Prescaler einstellen
mytimer.setMode(KANAL, TIMER_OUTPUT_COMPARE_PWM1, PIEZO_PIN); // Den PWM-Ausgang einstellen
}
void loop() {
}⏰ Wecker stellen
Häufig werden für die Programmierung eines zeitlichen Ablaufs “Wecker” benötigt. Eine Verzögerung mit delay(..) unterbricht den Programmablauf und ist oft nicht geschickt. Praktisch wäre ein Wecker, der nach Ablauf der Zeit die gewünschte Aktion auslöst ohne den Programmfluss zu behindern.
Hier zeige ich drei typische Lösungsansätze.
Aufgabe: Mit dem UserButton an PC13 soll ein 10 Sekunden Wecker gestellt werden, der statt Klingeln 0,3 Sekunden mit 2 kHz piepst.
Lösung mit Timer-ISR
static HardwareTimer myWecker = HardwareTimer(TIM2); // Timerinstanz für Zeit
static HardwareTimer myPieper = HardwareTimer(TIM3); // Timerinstanz für Piepen
#define USER_BTN PC13 // Entpreller lowaktiver UserButton auf dem Board
#define PIEZO_PIN PA7 // Lautsprecher an PA7/D11 -> TIM3_CH2
#define KANAL 2 // CH2
void isr_userB(){ // UserButton
myWecker.resume(); // Timer starten
}
void isr_Wecker(){ // Wecker ist abgelaufen
myWecker.pause(); // Timer stoppen, sonst würde er weiter laufen
myPieper.resume(); // Pieper starten
delay(300);
myPieper.pause(); // Pieper stoppen
}
void setup() {
pinMode(USER_BTN, INPUT);
attachInterrupt (digitalPinToInterrupt (USER_BTN), isr_userB, FALLING);
myPieper.setOverflow(2000, HERTZ_FORMAT); // Frequenz einstellen
myPieper.setCaptureCompare(KANAL,50,PERCENT_COMPARE_FORMAT); // Impulsbreite 50%
myPieper.setMode(KANAL, TIMER_OUTPUT_COMPARE_PWM1, PIEZO_PIN); // Den PWM-Ausgang einstellen
myWecker.setOverflow(10000000,MICROSEC_FORMAT); // Wecker auf 10 Sekunden stellen
myWecker.attachInterrupt(isr_Wecker); // ISR einstellen
}
void loop() {
}- Ermitteln Sie die längste Weckzeit, die damit erreicht werden kann, Herleitung!
- Wie können längere Weckzeiten erzielt werden?
- Was geschieht, wenn während der Wecker läuft der UserButton erneut gedrückt wird?
Lösungen
- Maximale Zeit: MaxPrescaler * MaxOverflow / TimerCLK = 232 / 32 MHz = 134,22 s
- In der isr_Wecker() einen Zähler einbauen und mehrere Durchläufe zählen
- Nichts, den Timer wieder zu starten während er läuft bringt keine Veränderung.
Lösung mit millis()
Bei Arduino ist eine Funktion millis(): uint32_t🔗 eingebaut (intern wird dafür ein Timer abgestellt der die Zeit zählt), sie gibt die Millisekunden seit Systemstart zurück.
static HardwareTimer myPieper = HardwareTimer(TIM3); // Timerinstanz für Piepen
#define USER_BTN PC13 // Entpreller lowaktiver UserButton auf dem Board
#define PIEZO_PIN PA7 // Lautsprecher an PA7/D11 -> TIM3_CH2
#define KANAL 2 // CH2
unsigned long weckzeit; // wann der Wecker "klingeln" soll
enum zustandstyp {CHILLEN,WECKER,PIEPEN};
zustandstyp zustand=CHILLEN;
void stelleWecker(int n){ // n ist Zeit in ms
weckzeit = millis()+n;
}
bool abgelaufenWecker(){
return millis()>=weckzeit;
}
void isr_userB(){ // Wecker stellen
switch(zustand){
case CHILLEN:
stelleWecker(10000); // auf 10 Sekunden stellen
zustand=WECKER;
}
}
void setup() {
pinMode(USER_BTN, INPUT);
attachInterrupt (digitalPinToInterrupt (USER_BTN), isr_userB, FALLING);
myPieper.setOverflow(2000, HERTZ_FORMAT); // Frequenz einstellen
myPieper.setCaptureCompare(KANAL,50,PERCENT_COMPARE_FORMAT); // Impulsbreite 50%
myPieper.setMode(KANAL, TIMER_OUTPUT_COMPARE_PWM1, PIEZO_PIN); // Den PWM-Ausgang einstellen
}
void loop() {
switch(zustand){
case CHILLEN:
break;
case WECKER: // Wecker ist gestellt, warten auf Klingeln
if(abgelaufenWecker()){
myPieper.resume(); // Pieper an
stelleWecker(300);
zustand=PIEPEN;
}
break;
case PIEPEN: // Piepen auch mit Wecker gelöst
if(abgelaufenWecker()){
myPieper.pause();
zustand=CHILLEN;
}
break;
}
}- Erstellen Sie ein Zustandsdiagramm für den Code.
- Was passiert, wenn während der Wecker läuft der UserButton erneut gedrückt wird?
- Was passiert, wenn während des Piepens der UserButton gedrückt wird?
- Nach welcher Zeit springt millis() wieder auf 0? Muss dies bei dem Wecker beachtet werden, Begründung?
- Bonus: Entwickeln Sie eine Totmanneinrichtung🔗
Lösung 1

Lösungen 2..4
- Nichts.
- Keine Auswirkung.
- Datentyp uint32_t ist 32 Bit, nach 232 ms = 4294967,3 s = 1193 h = 49,71 Tagen springt er wieder auf 0. Falls der Wert nahe dem Maximalwert ist kann es passieren, dass beim Stellen des Weckers der Wecker sofort ausgelöst wird, weil durch den Überlauf die Summe kleiner als die aktuelle millis()-Zeit ist. Falls Sie Anwendungen bauen die länger als 49 Tage durchgehend laufen sollten Sie dies beachten!
Lösung mit selbst gebautem Zeitticker
Wenn Software ohne Arduino-Umgebung erstellt wird und deshalb millis() nicht zu Verfügung steht wünsche ich mir für Weckzeiten einen eigenen Zeitticker, ich habe in diesen Fällen oft in einem periodischen Interrupt z.B. für eine Multiplexanzeige einen Zähler eingebaut, der mir eine Zeitbasis (Ticks) gibt. Für die Problemstellung würde als Zeitbasis 0,1 Sekunden reichen.
Erstellen Sie eine Lösung mit einem Timer myTicker, der alle 0,1 s eine Variable myTicks:GZ hochzählt und deren Weckzeiten darauf basiert.
Mögliche Lösung
static HardwareTimer myTicker = HardwareTimer(TIM2); // Timerinstanz für Zeit
static HardwareTimer myPieper = HardwareTimer(TIM3); // Timerinstanz für Piepen
#define USER_BTN PC13 // Entpreller lowaktiver UserButton auf dem Board
#define PIEZO_PIN PA7 // Lautsprecher an PA7/D11 -> TIM3_CH2
#define KANAL 2 // CH2
unsigned long weckzeit; // wann der Wecker "klingeln" soll
unsigned long myTicks=0; // 0,1s Ticks
enum zustandstyp {CHILLEN,WECKER,PIEPEN};
zustandstyp zustand=CHILLEN;
void stelleWecker(int n){ // n ist Zeit in 0,1s
weckzeit = myTicks+n;
}
bool abgelaufenWecker(){
return myTicks>=weckzeit;
}
void isr_userB(){ // Wecker stellen
stelleWecker(100); // auf 10 Sekunden stellen
zustand=WECKER;
}
void isr_Tick(){ // Tickzeit erhöhen
myTicks++;
}
void setup() {
pinMode(USER_BTN, INPUT);
attachInterrupt (digitalPinToInterrupt (USER_BTN), isr_userB, FALLING);
myPieper.setOverflow(2000, HERTZ_FORMAT); // Frequenz einstellen
myPieper.setCaptureCompare(KANAL,50,PERCENT_COMPARE_FORMAT); // Impulsbreite 50%
myPieper.setMode(KANAL, TIMER_OUTPUT_COMPARE_PWM1, PIEZO_PIN); // Den PWM-Ausgang einstellen
myTicker.setOverflow(100000,MICROSEC_FORMAT); // Ticks auf 0,1 Sekunden stellen
myTicker.attachInterrupt(isr_Tick); // ISR einstellen
myTicker.resume(); // Ticker starten
}
void loop() {
switch(zustand){
case CHILLEN:
break;
case WECKER: // Wecker ist gestellt, warten auf Klingeln
if(abgelaufenWecker()){
myPieper.resume(); // Pieper an
stelleWecker(3); // 0,3 Sekunden
zustand=PIEPEN;
}
break;
case PIEPEN: // Piepen auch mit Wecker gelöst
if(abgelaufenWecker()){
myPieper.pause();
zustand=CHILLEN;
}
break;
}
}☕️ Kaffeeautomat (HP12-2)
Ein einfacher Kaffeeautomat soll entwickelt werden. Mit dem Taster EIN_AUS isr_einAus() wird der Automat eingeschaltet und kann jederzeit wieder ausgeschaltet werden auch mitten in einer Aktion. Beim Ausschalten werden alle Ausgänge auf 0 gesetzt mit ausschaltenAlles(). Es sind Zustände vorgegeben: AUS,HEIZEN_ENTRY,HEIZEN,HEISS,PUMPEN.
| Taster | PortPin | PortPin | Ausgang |
|---|---|---|---|
| EIN_AUS | PC13 (LowAktiv) | PC0 | HEIZUNG |
| KL_TA | PA1 (HighAktiv) | PC1 | PUMPE |
| GR_TA | PA6 (HighAktiv) | PC2 | LED |
- Nach dem Einschalten wird das Wasser für 15 Sekunden (Wecker) aufgeheizt (HEIZUNG=1) dabei blinkt die LED mit 4 Hz.
- Nach dem Heizen ist das Wasser heiss, die LED leuchtet dauernd und die Heizung ist aus.
- Nun kann mit KL_TA eine kleine Tasse oder mit GR_TA eine große Tasse angefordert werden.
- Bei einer kleinen Tasse läuft die Pumpe 5 Sekunden.
- Bei einer großen Tasse 10 Sekunden.
- Während die Pumpe läuft blinkt die LED mit 1 Hz.
- Nach Ausgabe einer Tasse wird das Wasser wieder aufgeheizt.
// Codevorgabe
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
# define EIN_AUS PC13 // Entpreller lowaktiver UserButton auf dem Board
# define KL_TA PA1
# define GR_TA PA6
# define HEIZUNG PC0
# define PUMPE PC1
# define LED PC2
enum zustandstyp {AUS,HEIZEN_ENTRY,HEIZEN,HEISS,PUMPEN};
zustandstyp zustand=AUS;
uint32_t weckzeit; // Zeit zum Wecken
void ausschaltenAlles(){ // Alles ist aus
}
void stelleWecker(int n){ // Wecker stellen, n sind Sekunden
}
bool abgelaufenWecker(){ // True, wenn Wecker abgelaufen ist
}
void isr_einAus(){ // Externer Interrupt
}
void isr_blinken(){ // Invertiert die LED
}
void blinkenLED(int n){ // Einstellen der Blinkzeit
}
void einschaltenLED(){ // LED leuchtet dauernd
}
void setup() {
pinMode(EIN_AUS, INPUT);
..
}
void loop() {
switch (zustand){
}
}☕️ 1. Vervollständigen Sie das Zustandsdiagramm 10P

Mögliche Lösung Kaffeeautomat Zustandsdiagramm

☕️ 2. Welche Taster müssen entprellt sein? 3P
Begründen Sie welche Taster entprellt sein müssen.
Lösung
Der Taster EIN_AUS muss entprellt sein, weil sonst bei Betätigung der Automat zufällig an oder aus ist.
Die Taster KL_TA und GR_TA müssen nicht unbedingt entprellt sein, nach dem ersten HIGH wir in den Zustand PUMPEN verzweigt und die Taster werden nicht mehr weiter abgefragt.
☕️ 3. Initialisierung der Pins 4P
Erstellen Sie die Codesequenz um die Pins zu initialisieren.
Lösung
pinMode(EIN_AUS, INPUT);
pinMode(KL_TA, INPUT_PULLDOWN);
pinMode(GR_TA, INPUT_PULLDOWN);
pinMode(HEIZUNG, OUTPUT);
pinMode(PUMPE, OUTPUT);
pinMode(LED, OUTPUT);☕️ 4. isr_einAus() 5P
Erstellen Sie die Codesequenz zur Initialisierung der ISR und den Code für isr_einAus().
Lösung
attachInterrupt (digitalPinToInterrupt (EIN_AUS), isr_einAus, FALLING);
void isr_einAus(){ // Externer Interrupt
if(zustand==AUS){
zustand=HEIZEN_ENTRY;
}
else{
zustand=AUS;
auschaltenAlles();
}
}☕️ 5. ausschaltenAlles() 3P
Erstellen Sie den Code für ausschaltenAlles(). Alle Ausgänge werden auf 0 geschaltet, es blinkt auch nichts mehr.
Lösung
void ausschaltenAlles(){ // Alles ist aus
mytimer.pause(); // keine ISRs mehr ausloesen
digitalWrite(LED,LOW);
digitalWrite(HEIZUNG,LOW);
digitalWrite(PUMPE,LOW);
}☕️ 6. Weckerfunktionen 4P
Erstellen Sie den Code für stelleWecker(int n) und abgelaufenWecker():bool.
Für die 15,10,5 Sekunden wird ein Wecker mit stelleWecker(int n) gestellt. Der Parameter n gibt die Weckzeit in Sekunden vor. Mit abgelaufenWecker():bool wird der Wecker abgefragt -> true wenn Wecker abgelaufen ist. Der Wecker verwendet die millis()-Funktion
Lösung
void stelleWecker(int n){ // Wecker stellen n sind Sekunden
weckzeit = millis()+n*1000;
}
bool abgelaufenWecker(){ // True, wenn Wecker abgelaufen ist
return millis()>=weckzeit;
}☕️ 7. LED blinken und dauernd leuchten lassen 10P
Die LED soll blinken, dauerleuchten und aus sein. Das LED-Blinken wird mit einer isr_blinken() und Timer3 erzeugt.
Für das Einstellen des LED-Blinkens wird ein Unterprogramm blinkenLED(int n) verwendet. Der Parameter n ist die Blinkfrequenz.
Erstellen Sie den Code für die Initialisierung von isr_blinken(), isr_blinken(), blinkenLED(int n) und einschaltenLED().
Lösung
mytimer.attachInterrupt(isr_blinken); // Timer ISR einstellen
void isr_blinken(){ // Invertiert die LED
digitalWrite(LED,!digitalRead(LED));
}
void blinkenLED(int n){ // Einstellen der Blinkzeit
mytimer.setOverflow(n*2,HERTZ_FORMAT);
mytimer.resume();
}
void einschaltenLED(){ // LED leuchtet dauernd
mytimer.pause();
digitalWrite(LED,HIGH);
}☕️ 8. loop() 15P
Erstellen Sie den Code für die loop().
Lösung
switch (zustand){
case HEIZEN_ENTRY:
digitalWrite(HEIZUNG,HIGH);
stelleWecker(15);
blinkenLED(4);
zustand=HEIZEN;
break;
case HEIZEN:
if(abgelaufenWecker()){
zustand=HEISS;
digitalWrite(HEIZUNG,LOW);
einschaltenLED();
}
break;
case HEISS:
if(digitalRead(KL_TA)){
zustand=PUMPEN;
stelleWecker(5);
blinkenLED(1);
digitalWrite(PUMPE,HIGH);
}
else if (digitalRead(GR_TA)){
zustand=PUMPEN;
stelleWecker(10);
blinkenLED(1);
digitalWrite(PUMPE,HIGH);
}
break;
case PUMPEN:
if(abgelaufenWecker()){
zustand=HEIZEN_ENTRY;
digitalWrite(PUMPE,LOW);
}
break;
}Mögliche komplette Lösung Kaffeeautomat
#include <Arduino.h>
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
# define EIN_AUS PC13 // Entpreller lowaktiver UserButton auf dem Board
# define KL_TA PA1
# define GR_TA PA6
# define HEIZUNG PC0
# define PUMPE PC1
# define LED PC1
enum zustandstyp {AUS,HEIZEN_ENTRY,HEIZEN,HEISS,PUMPEN};
zustandstyp zustand=AUS;
uint32_t weckzeit; // Zeit zum Wecken
void ausschaltenAlles(){ // Alles ist aus
mytimer.pause(); // keine ISRs mehr ausloesen
digitalWrite(LED,LOW);
digitalWrite(HEIZUNG,LOW);
digitalWrite(PUMPE,LOW);
}
void stelleWecker(int n){ // Wecker stellen n sind Sekunden
weckzeit = millis()+n*1000;
}
bool abgelaufenWecker(){ // True, wenn Wecker abgelaufen ist
return millis()>=weckzeit;
}
void isr_einAus(){ // Externer Interrupt
if(zustand==AUS){
zustand=HEIZEN_ENTRY;
}
else{
zustand=AUS;
ausschaltenAlles();
}
}
void isr_blinken(){ // Invertiert die LED
digitalWrite(LED,!digitalRead(LED));
}
void blinkenLED(int n){ // Einstellen der Blinkzeit
mytimer.setOverflow(n*2,HERTZ_FORMAT);
mytimer.resume();
}
void einschaltenLED(){ // LED leuchtet dauernd
mytimer.pause();
digitalWrite(LED,HIGH);
}
void setup() {
pinMode(EIN_AUS, INPUT);
pinMode(KL_TA, INPUT_PULLDOWN);
pinMode(GR_TA, INPUT_PULLDOWN);
pinMode(HEIZUNG, OUTPUT);
pinMode(PUMPE, OUTPUT);
pinMode(LED, OUTPUT);
attachInterrupt (digitalPinToInterrupt (EIN_AUS), isr_einAus, FALLING);
mytimer.attachInterrupt(isr_blinken); // Timer ISR einstellen
}
void loop() {
switch (zustand){
case HEIZEN_ENTRY:
digitalWrite(HEIZUNG,HIGH);
stelleWecker(15);
blinkenLED(4);
zustand=HEIZEN;
break;
case HEIZEN:
if(abgelaufenWecker()){
zustand=HEISS;
digitalWrite(HEIZUNG,LOW);
einschaltenLED();
}
break;
case HEISS:
if(digitalRead(KL_TA)){
zustand=PUMPEN;
stelleWecker(5);
blinkenLED(1);
digitalWrite(PUMPE,HIGH);
}
else if (digitalRead(GR_TA)){
zustand=PUMPEN;
stelleWecker(10);
blinkenLED(1);
digitalWrite(PUMPE,HIGH);
}
break;
case PUMPEN:
if(abgelaufenWecker()){
zustand=HEIZEN_ENTRY;
digitalWrite(PUMPE,LOW);
}
break;
}
}☕️ 9. Wasser wieder erwärmen 10P
Nach 20 Sekunden im Zustand HEISS wird das Wasser kalt und muss wieder erhitzt werden. Nach 2 mal Nachheizen ohne Benutzung schaltet sich der Automat aus. Erweitern Sie ihr Zustandsdiagramm und Programm.
Mögliche Lösung Kaffeeautomat Zustandsdiagramm

Mögliche komplette Lösung Kaffeeautomat
#include <Arduino.h>
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
# define EIN_AUS PC13 // Entpreller lowaktiver UserButton auf dem Board
# define KL_TA PA1
# define GR_TA PA6
# define HEIZUNG PC0
# define PUMPE PC1
# define LED PC2
enum zustandstyp {AUS,HEIZEN_ENTRY,HEIZEN,HEISS,PUMPEN};
zustandstyp zustand=AUS;
uint32_t weckzeit; // Zeit zum Wecken
int autoAus=0;
void auschaltenAlles(){
mytimer.pause(); // keine ISRs mehr ausloesen
digitalWrite(LED,LOW);
digitalWrite(HEIZUNG,LOW);
digitalWrite(PUMPE,LOW);
}
void stelleWecker(int n){
weckzeit = millis()+n*1000;
}
bool abgelaufenWecker(){
return millis()>=weckzeit;
}
void isr_einAus(){
if(zustand==AUS){
zustand=HEIZEN_ENTRY;
}
else{
zustand=AUS;
auschaltenAlles();
autoAus=0;
}
}
void isr_blinken(){
digitalWrite(LED,!digitalRead(LED));
}
void blinkenLED(int n){ // Werte verändern und testen
mytimer.setOverflow(n*2,HERTZ_FORMAT);
mytimer.resume();
}
void einschaltenLED(){
mytimer.pause();
digitalWrite(LED,HIGH);
}
void setup() {
pinMode(EIN_AUS, INPUT);
pinMode(KL_TA, INPUT_PULLDOWN);
pinMode(GR_TA, INPUT_PULLDOWN);
pinMode(HEIZUNG, OUTPUT);
pinMode(PUMPE, OUTPUT);
pinMode(LED, OUTPUT);
attachInterrupt (digitalPinToInterrupt (EIN_AUS), isr_einAus, FALLING);
mytimer.attachInterrupt(isr_blinken); // Timer ISR einstellen
}
void loop() {
switch (zustand){
case HEIZEN_ENTRY:
digitalWrite(HEIZUNG,HIGH);
stelleWecker(15);
blinkenLED(4);
zustand=HEIZEN;
break;
case HEIZEN:
if(autoAus>2){
zustand=AUS;
auschaltenAlles();
autoAus=0;
}
if(abgelaufenWecker()){
zustand=HEISS;
digitalWrite(HEIZUNG,LOW);
einschaltenLED();
stelleWecker(20);
}
break;
case HEISS:
if(digitalRead(KL_TA)){
zustand=PUMPEN;
stelleWecker(5);
blinkenLED(1);
digitalWrite(PUMPE,HIGH);
}
else if(digitalRead(GR_TA)){
zustand=PUMPEN;
stelleWecker(10);
blinkenLED(1);
digitalWrite(PUMPE,HIGH);
}
else if(abgelaufenWecker()){
zustand=HEIZEN_ENTRY;
autoAus++;
}
break;
case PUMPEN:
if(abgelaufenWecker()){
zustand=HEIZEN_ENTRY;
digitalWrite(PUMPE,LOW);
autoAus=0;
}
break;
}
}🪥 🚧 Elektrische Zahnbürste (HP19-2)
Zur Unterstützung einer optimalen Zahnhygiene soll die Nutzerin einer elektrischen Zahnbürste motiviert werden die 4 Quadranten des Mundes jeweils 30 Sekunden zu putzen. Ein Taster EIN_AUS (LowAktiv, entprellt) schaltet die Zahnbürste ein und aus jedem Zustand wieder aus. Der Putzfortschritt wird durch ein ein LED-Leuchtband (LEDA..LEDD) angezeigt, nach 2 Minuten leuchten alle 4 LEDs.
- Nach dem Einschalten mit Taster EIN_AUS leuchtet zunächst LEDA für den ersten Quadranten und der Motor wird eingeschaltet. Zustand AN.
- Nach 29,5 Sekunden stoppt der Motor kurz für 0,5 Sekunden im Zustand STOPP.
- Für jeden weiteren Quadranten wird eine weitere LED an und der Motor wieder eingeschaltet.
- Nach 2 Minuten geht der Motor 3 mal aus und wieder an. Zustand ZEIT_UM.
- Danach wird wieder in den Zustand AN verzweigt.
- Immer wenn alle Quadranten geputzt wurden (%4==0) wird in den Zustand ZEIT_UM verzweigt, sonst in den Zustand AN.
| Taster | PortPin | PortPin | Ausgang |
|---|---|---|---|
| EIN_AUS | PC13 (LowAktiv, entprellt) | PC0 | LEDA |
| MODUS | PA1 (HighAktiv, prellt) | PC1 | LEDB |
| PC2 | LEDC | ||
| PC3 | LEDD | ||
| PC6 | MOTOR |
// Vorgabe Code
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
# define EIN_AUS PC13 // Entpreller lowaktiver UserButton auf dem Board
# define MODUS PA1 // Taster highaktiv prellend
# define MOTOR PC6 // PWM mit Timer 3 Kanal 1 möglich
enum zustandstyp {AUS,AN_ENTRY,AN,STOPP,ZEIT_UM,AUFHELLEN,SENSITIV};
zustandstyp zustand=AUS;
uint32_t weckzeit; // Zeit zum Wecken
int quadrant = 0; // Mundquadrant, der gerade geputzt werden soll
void anschaltenMotor(){
}
void ausschaltenMotor(){
}
void ausschaltenLED(){ // schaltet nur die LED aus
}
void stelleWecker(int n){ // n in Zehntelsekunden
}
bool abgelaufenWecker(){ // true, wenn Weckzeit vorbei
}
void isr_einAus(){ // wird mit EIN_AUS aufgerufen
}
void ausgebenLED(int n){ // gibt Leuchtband aus
}
void setup() {
}
void loop() {
}🪥 1. Vervollständigen Sie das Zustandsdiagramm

Mögliche Lösung Zustandsdiagramm

🪥 2. Initialisierung der Pins
Erstellen Sie die Codesequenz um die Pins zu initialisieren.
Lösung
pinMode(PC0, OUTPUT); // LEDA Ausgang
pinMode(PC1, OUTPUT); // LEDB Ausgang
pinMode(PC2, OUTPUT); // LEDC Ausgang
pinMode(PC3, OUTPUT); // LEDD Ausgang
pinMode(MOTOR, OUTPUT); // Motor Ausgang
pinMode(EIN_AUS, INPUT);
pinMode(MODUS, INPUT_PULLDOWN);🪥 3. isr_einAus()
Erstellen Sie die Codesequenz zur Initialisierung der ISR und den Code für isr_einAus().
Lösung
attachInterrupt (digitalPinToInterrupt (EIN_AUS), isr_einAus, FALLING);
void isr_einAus(){ // wird mit EIN_AUS aufgerufen
if(zustand==AUS){
zustand=AN_ENTRY;
}
else{
zustand=AUS;
ausschaltenLED();
ausschaltenMotor();
quadrant=0;
}
}🪥 4. Motor und LEDs schalten
Erstellen Sie den Programmcode für anschaltenMotor(), ausschaltenMotor() und ausschaltenLED().
Lösung
void anschaltenMotor(){
digitalWrite(MOTOR,HIGH);
}
void ausschaltenMotor(){
digitalWrite(MOTOR,LOW);
}
void ausschaltenLED(){// schaltet nur die LED aus
GPIOC->ODR &= ~0b1111;
}🪥 5. Weckerfunktion
Erstellen Sie den Code für stelleWecker(int n) und abgelaufenWecker():bool.
Mit stelleWecker(int n) wird die Weckzeit in Zehntelsekunden gestellt. Mit abgelaufenWecker():bool wird der Wecker abgefragt -> true wenn Wecker abgelaufen ist. Der Wecker verwendet die millis()-Funktion
Lösung
void stelleWecker(int n){ // n in Zehntelsekunden
weckzeit = millis()+n*100;
}
bool abgelaufenWecker(){ // true, wenn Weckzeit vorbei
return millis()>=weckzeit;
}🪥 6. ausgebenLED(int n)
Erstellen Sie den Code für ausgebenLED(int n), das ein Leuchtband mit LEDA..LEDD ausgibt. Für n=0 leuchtet LEDA, für n>2 leuchten alle 4 LED.
Lösung
void ausgebenLED(int n){ // gibt Leuchtband aus
switch (n){
case 0:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b1;
break;
case 1:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b11;
break;
case 2:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b111;
break;
default: // für quadrant > 2
GPIOC->ODR = GPIOC->ODR | 0b1111;
break;
}
}🪥 7. loop()
Erstellen Sie den Code für die loop().
Lösung
void loop() {
switch (zustand){
case AN_ENTRY:
stelleWecker(55); // 295, mit 55 testen
anschaltenMotor();
ausgebenLED(quadrant);
zustand=AN;
break;
case AN:
if(abgelaufenWecker()){
zustand=STOPP;
quadrant++;
stelleWecker(5);
ausschaltenMotor();
}
break;
case STOPP:
if(abgelaufenWecker()){
if(quadrant%4==0) zustand=ZEIT_UM;
else zustand=AN_ENTRY;
}
break;
case ZEIT_UM:
anschaltenMotor();
delay(200);
ausschaltenMotor();
delay(200);
anschaltenMotor();
delay(200);
ausschaltenMotor();
delay(200);
zustand=AN_ENTRY;
break;
}
}Mögliche komplette Lösung
#include <Arduino.h>
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
# define EIN_AUS PC13 // Entpreller lowaktiver UserButton auf dem Board
# define MODUS PA1 // Taster highaktiv prellend
# define MOTOR PC6 // PWM mit Timer 3 Kanal 1 möglich
enum zustandstyp {AUS,AN_ENTRY,AN,STOPP,ZEIT_UM,AUFHELLEN,SENSITIV};
zustandstyp zustand=AUS;
uint32_t weckzeit; // Zeit zum Wecken
int quadrant = 0; // Mundquadrant, der gerade geputzt werden soll
void anschaltenMotor(){
digitalWrite(MOTOR,HIGH);
}
void ausschaltenMotor(){
digitalWrite(MOTOR,LOW);
}
void ausschaltenLED(){// schaltet nur die LED aus
GPIOC->ODR &= ~0b1111;
}
void stelleWecker(int n){ // n in Zehntelsekunden
weckzeit = millis()+n*100;
}
bool abgelaufenWecker(){ // true, wenn Weckzeit vorbei
return millis()>=weckzeit;
}
void isr_einAus(){ // wird mit EIN_AUS aufgerufen
if(zustand==AUS){
zustand=AN_ENTRY;
}
else{
zustand=AUS;
ausschaltenLED();
ausschaltenMotor();
quadrant=0;
}
}
void ausgebenLED(int n){ // gibt Leuchtband aus
switch (n){
case 0:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b1;
break;
case 1:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b11;
break;
case 2:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b111;
break;
default: // für quadrant > 2
GPIOC->ODR = GPIOC->ODR | 0b1111;
break;
}
}
void setup() {
pinMode(PC0, OUTPUT); // LEDA Ausgang
pinMode(PC1, OUTPUT); // LEDB Ausgang
pinMode(PC2, OUTPUT); // LEDC Ausgang
pinMode(PC3, OUTPUT); // LEDD Ausgang
pinMode(MOTOR, OUTPUT); // Motor Ausgang
pinMode(EIN_AUS, INPUT);
pinMode(MODUS, INPUT_PULLDOWN);
attachInterrupt (digitalPinToInterrupt (EIN_AUS), isr_einAus, FALLING);
}
void loop() {
switch (zustand){
case AN_ENTRY:
stelleWecker(55); // 295, mit 55 testen
anschaltenMotor();
ausgebenLED(quadrant);
zustand=AN;
break;
case AN:
if(abgelaufenWecker()){
zustand=STOPP;
quadrant++;
stelleWecker(5);
ausschaltenMotor();
}
break;
case STOPP:
if(abgelaufenWecker()){
if(quadrant%4==0) zustand=ZEIT_UM;
else zustand=AN_ENTRY;
}
break;
case ZEIT_UM:
anschaltenMotor();
delay(200);
ausschaltenMotor();
delay(200);
anschaltenMotor();
delay(200);
ausschaltenMotor();
delay(200);
zustand=AN_ENTRY;
break;
}
}🪥 8. Weitere Betriebsmodi: Aufhellen und Sensitiv
Mit dem Taster MODUS (PA1, HighAktiv, prellt) kann aus dem Zustand AN in zwei weitere Modi (AUFHELLEN und SENSITIV) geschaltet werden.
AN -[MODUS]-> AUFHELLEN -[MODUS]-> SENSITIV. Diese Modi kennen keine Quadranten und können nur durch Ausschalten beendet werden.
- AUFHELLEN: Aufruf der Funktionen aufhellen() (Der Bürstenmotor wird nun mit 1 Hz Rechtecksignal angesteuert) und ausschaltenLED()
- SENSITIV: Aufruf der Funktion sensitiv() (Der Bürstenmotor wird nun mit 50 Hz Rechtecksignal angesteuert).
🪥 8.1 MODUS Taste entprellen
Um die MODUS-Taste zu entprellen erstellen Sie eine Funktion boolean checkModus() die beim Drücken des high-aktiven prellenden (10 ms) Tasters an PA1 ein true zurückgibt (Flankendedektion, Entprellen). Diese Funktion wird im Zustandsdiagramm und Programm verwendet, Codevorgabe:
boolean checkModus(){ // prellfreies Ueberpruefen Tastendruck
static boolean oldT=false; // static bewirkt persistente lokale Variable
...
return false;
}Lösung
boolean checkModus(){ // prellfreies Ueberpruefen Tastendruck
static boolean oldT=false; // static bewirkt persistente lokale Variable
if (oldT!=digitalRead(MODUS)){
delay(20); // Prellen abwarten
if (oldT!=digitalRead(MODUS)){ // immer noch?
oldT=!oldT; // neuer Wert ist anders
return oldT; // steigende Flanke wenn neuer Wert = true
}
}
return false;
}🪥 8.2 Zustandsdiagramm erweitern
Erweitern Sie das Zustandsdiagramm.
Mögliche Lösung Zustandsdiagramm

🪥 8.3 Motoransteuerung mit Timer-PWM (meine bevorzugte Lösung)
Die Motoransteuerung geschieht über [PWM-Prozent] mit Timer3-PWM Kanal 1. Ergänzen Sie den Code für aufhellen(), sensitiv() und loop(). Codeschnipsel:
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
void anschaltenMotor(){
mytimer.setOverflow(100,HERTZ_FORMAT); // Frequenz einstellen
mytimer.setCaptureCompare(1,100,PERCENT_COMPARE_FORMAT); // Impulsbreite einstellen
}
void ausschaltenMotor(){
mytimer.setOverflow(100,HERTZ_FORMAT); // Frequenz einstellen
mytimer.setCaptureCompare(1,0,PERCENT_COMPARE_FORMAT); // Impulsbreite einstellen
}
void aufhellen(){ // Motor läuft mit 1 Hz
...
}
void sensitiv(){ // Motor läuft mit 50 Hz
...
}
void setup() {
...
mytimer.setPWM(1, PC6, 100, 0); // Initialisierung mit 100 Hz
}
void loop() {
switch (zustand){
}
}Meine Lösung Kompletter Code
#include <Arduino.h>
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
# define EIN_AUS PC13 // Entpreller lowaktiver UserButton auf dem Board
# define MODUS PA1
# define MOTOR PC6 // Timer 3 Kanal 1
enum zustandstyp {AUS,AN_ENTRY,AN,STOPP,ZEIT_UM,AUFHELLEN,SENSITIV};
zustandstyp zustand=AUS;
uint32_t weckzeit; // Zeit zum Wecken
int quadrant = 0;
void anschaltenMotor(){
mytimer.setOverflow(100,HERTZ_FORMAT); // Frequenz einstellen
mytimer.setCaptureCompare(1,100,PERCENT_COMPARE_FORMAT); // Impulsbreite einstellen
}
void ausschaltenMotor(){
mytimer.setOverflow(100,HERTZ_FORMAT); // Frequenz einstellen
mytimer.setCaptureCompare(1,0,PERCENT_COMPARE_FORMAT); // Impulsbreite einstellen
}
void ausschaltenLED(){
GPIOC->ODR = 0;
}
void stelleWecker(int n){ // Zehntelsekunden
weckzeit = millis()+n*100;
}
bool abgelaufenWecker(){
return millis()>=weckzeit;
}
void isr_einAus(){
if(zustand==AUS){
zustand=AN_ENTRY;
}
else{
zustand=AUS;
ausschaltenLED();
ausschaltenMotor();
quadrant=0;
}
}
void ausgebenLED(int n){
switch (n){
case 0:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b1;
break;
case 1:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b11;
break;
case 2:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b111;
break;
default:
GPIOC->ODR = GPIOC->ODR | 0b1111;
break;
}
}
void aufhellen(){
mytimer.setOverflow(1,HERTZ_FORMAT); // Frequenz einstellen
mytimer.setCaptureCompare(1,50,PERCENT_COMPARE_FORMAT); // Impulsbreite einstellen
}
void sensitiv(){
mytimer.setOverflow(10,HERTZ_FORMAT); // Frequenz einstellen
mytimer.setCaptureCompare(1,50,PERCENT_COMPARE_FORMAT); // Impulsbreite einstellen
}
boolean checkModus(){ // prellfreies Ueberpruefen Tastendruck
static boolean oldT=false;
if (oldT!=digitalRead(MODUS)){
delay(20); // Prellen abwarten
if (oldT!=digitalRead(MODUS)){ // immer noch?
oldT=!oldT; // neuer Wert ist anders
return oldT; // steigende Flanke wenn neuer Wert = true
}
}
return false;
}
void setup() {
pinMode(PC0, OUTPUT); // ohne diese Zeile klappts nicht mit MODER
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(EIN_AUS, INPUT);
pinMode(MODUS, INPUT_PULLDOWN);
pinMode(MOTOR, OUTPUT);
attachInterrupt (digitalPinToInterrupt (EIN_AUS), isr_einAus, FALLING);
mytimer.setPWM(1, PC6, 100, 0); // Initialisierung mit 100 Hz
}
void loop() {
switch (zustand){
case AN_ENTRY:
stelleWecker(55); // 295, mit 55 testen
anschaltenMotor();
ausgebenLED(quadrant);
zustand=AN;
break;
case AN:
if(abgelaufenWecker()){
zustand=STOPP;
quadrant++;
stelleWecker(5);
ausschaltenMotor();
}
if(checkModus()){
ausschaltenLED();
aufhellen();
zustand=AUFHELLEN;
}
break;
case STOPP:
if(abgelaufenWecker()){
if(quadrant%4==0) zustand=ZEIT_UM;
else zustand=AN_ENTRY;
}
break;
case ZEIT_UM:
anschaltenMotor();
delay(200);
ausschaltenMotor();
delay(200);
anschaltenMotor();
delay(200);
ausschaltenMotor();
delay(200);
zustand=AN_ENTRY;
break;
case AUFHELLEN:
if (checkModus()){
sensitiv();
zustand=SENSITIV;
}
break;
case SENSITIV:
break;
}
}🪥 8.4 Motoransteuerung mit Timer und ABI-Bezug (kein PWM mit Timer-Kanälen)
Leider ist die Verwendung von echtem PWM mit Timerkanälen (setCaptureCompare usw.) derzeit nicht bei ABI-Aufgaben vorgesehen. Daher sollte diese Aufgabe im ABI mit Timer-ISRs gelöst werden. Somit müsste aufhellen() und sensitiv() mit Timer-ISR so erzeugt werden:
- Eine Timer ISR isr_Motor() invertiert den Motorausgang. Verwenden Sie z.B. Timer3.
- In den Operationen sensitiv() und aufhellen() wird u.a. die Interruptzeit passend eingestellt..
Erstellen Sie den modifizierten Code für die Initialisierung der Timer ISR, der Operationen isr_Motor(), ausschaltenMotor(), aufhellen() und sensitiv().
Mögliche komplette Lösung
#include <Arduino.h>
static HardwareTimer mytimer = HardwareTimer(TIM3); // Timerinstanz sowie Timerauswahl
# define EIN_AUS PC13 // Entpreller lowaktiver UserButton auf dem Board
# define MODUS PA1 // Taster highaktiv prellend
# define MOTOR PC6 // PWM mit Timer 3 Kanal 1 möglich
enum zustandstyp {AUS,AN_ENTRY,AN,STOPP,ZEIT_UM,AUFHELLEN,SENSITIV};
zustandstyp zustand=AUS;
uint32_t weckzeit; // Zeit zum Wecken
int quadrant = 0; // Mundquadrant, der gerade geputzt werden soll
void anschaltenMotor(){
digitalWrite(MOTOR,HIGH);
}
void ausschaltenMotor(){
mytimer.pause();
digitalWrite(MOTOR,LOW);
}
void ausschaltenLED(){// schaltet nur die LED aus
GPIOC->ODR &= ~0b1111;
}
void stelleWecker(int n){ // n in Zehntelsekunden
weckzeit = millis()+n*100;
}
bool abgelaufenWecker(){ // true, wenn Weckzeit vorbei
return millis()>=weckzeit;
}
void isr_einAus(){ // wird mit EIN_AUS aufgerufen
if(zustand==AUS){
zustand=AN_ENTRY;
}
else{
zustand=AUS;
ausschaltenLED();
ausschaltenMotor();
quadrant=0;
}
}
void ausgebenLED(int n){ // gibt Leuchtband aus
switch (n){
case 0:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b1;
break;
case 1:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b11;
break;
case 2:
GPIOC->ODR = (GPIOC->ODR & ~0b1111) | 0b111;
break;
default: // für quadrant > 2
GPIOC->ODR = GPIOC->ODR | 0b1111;
break;
}
}
void isr_Motor(){ // MotorAusgang invertieren
digitalWrite(MOTOR,!digitalRead(MOTOR));
}
void aufhellen(){ // Motor läuft mit 1 Hz
mytimer.setOverflow(2,HERTZ_FORMAT);
mytimer.resume();
}
void sensitiv(){ // Motor läuft mit 50 Hz
mytimer.setOverflow(100,HERTZ_FORMAT);
mytimer.resume();
}
boolean checkModus(){ // prellfreies Ueberpruefen Tastendruck
static boolean oldT=false;
if (oldT!=digitalRead(MODUS)){
delay(20); // Prellen abwarten
if (oldT!=digitalRead(MODUS)){ // immer noch?
oldT=!oldT; // neuer Wert ist anders
return oldT; // steigende Flanke wenn neuer Wert = true
}
}
return false;
}
void setup() {
pinMode(PC0, OUTPUT); // LEDA Ausgang
pinMode(PC1, OUTPUT); // LEDB Ausgang
pinMode(PC2, OUTPUT); // LEDC Ausgang
pinMode(PC3, OUTPUT); // LEDD Ausgang
pinMode(MOTOR, OUTPUT); // Motor Ausgang
pinMode(EIN_AUS, INPUT);
pinMode(MODUS, INPUT_PULLDOWN);
attachInterrupt (digitalPinToInterrupt (EIN_AUS), isr_einAus, FALLING);
mytimer.attachInterrupt(isr_Motor); // Timer ISR einstellen
}
void loop() {
switch (zustand){
case AN_ENTRY:
stelleWecker(55); // 295, mit 55 testen
anschaltenMotor();
ausgebenLED(quadrant);
zustand=AN;
break;
case AN:
if(abgelaufenWecker()){
zustand=STOPP;
quadrant++;
stelleWecker(5);
ausschaltenMotor();
}
if(checkModus()){
ausschaltenLED();
aufhellen();
zustand=AUFHELLEN;
}
break;
case STOPP:
if(abgelaufenWecker()){
if(quadrant%4==0) zustand=ZEIT_UM;
else zustand=AN_ENTRY;
}
break;
case ZEIT_UM:
anschaltenMotor();
delay(200);
ausschaltenMotor();
delay(200);
anschaltenMotor();
delay(200);
ausschaltenMotor();
delay(200);
zustand=AN_ENTRY;
break;
case AUFHELLEN:
if (checkModus()){
sensitiv();
zustand=SENSITIV;
}
break;
case SENSITIV:
break;
}
}🔊 Entfernung messen mit Ultraschallsensor HC-SR04 (HP17-2)
ToDo: Bilder von den Sensoren und der Rückseite machen!
Auf Funduino.de gibt es einen Sketch Nr.11 Entfernung messen, diesen wollte ich für unser Board mit dem STM32 anpassen. Auf Seite 10 der Boardbeschreibung wird gezeigt wie ein Ultraschallmodul HC-SR04 verwendet werden kann. An einem Trigger-Pin wird ein mindestens 10µs langes Startsignal angelegt und nach kurzer Zeit erhält man am Echo-Pin ein Signal dessen Dauer proportional zur Entfernung ist. Links auf mezdata.de zum Sensor.
Auch Lehrer machen Fehler: Der angepasste Funduino-Sketch wollte zunächst nicht funktionieren weil ich statt PC9 für das Echosignal PA9 eingetragen hatte. Hab ich aber erst gemerkt, als ich mit dem Oszilloskop Messungen durchführte:
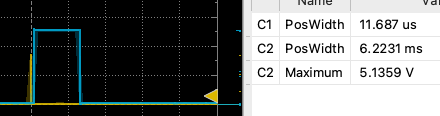
Messung mit dem Funduinomodul:
C1 (Channel1) , Gelb ist das Triggersignal, C2, blau das Echosignal. Entfernung ca. 1m.
Gefahr für den STM durch zu hohe Ausgangsspannung des Echo-Signals? Der STM arbeitet mit 3,3V und das Signal hat 5V, es könnte der Eingang beschädigt werden? Entwarnung: Habe zwischen Modul und Eingang einen 10kΩ Widerstand geschaltet und das Signal zeigt die Spannung am Eingang: 5,14V also fließt kein gefährlicher Strom.
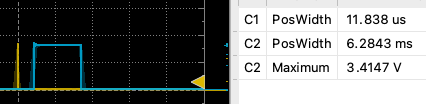
Messung mit dem Amazonmodul:
Echosignal kommt später und hat nur 3,4V
Ist wohl ein anderer µC verbaut..
Musste ein wenig suchen um den Schaltplan des Moduls zu finden und entdeckte zwei hochkarätige Seiten zum Thema: Circuit Diagram Ultrasonic Distance Sensor HC-SR04 und HC-SR04
Leider steht im Funduino-Sketch der übliche abgeschriebene Unsinn von anderen (Triggersignal ist 10ms lang statt 10µs wie in der Doku des Sensors verlangt). Doku zu pulseIn(), noch eine Anleitung. Hier mein modifizierter Sketch:
#define TRIGGER PA10
#define ECHO PC9
long dauer=0; // Das Wort dauer ist jetzt eine Variable, unter der die Zeit gespeichert wird, die eine Schallwelle bis zur Reflektion und zurück benötigt. Startwert ist hier 0.
long entfernung=0; // Das Wort „entfernung“ ist jetzt die variable, unter der die berechnete Entfernung gespeichert wird. Info: Anstelle von „int“ steht hier vor den beiden Variablen „long“. Das hat den Vorteil, dass eine größere Zahl gespeichert werden kann. Nachteil: Die Variable benötigt mehr Platz im Speicher.
void setup(){
Serial.begin (9600); //Serielle kommunikation starten, damit man sich später die Werte am serial monitor ansehen kann.
pinMode(TRIGGER, OUTPUT); // Trigger-Pin ist ein Ausgang
pinMode(ECHO, INPUT); // Echo-Pin ist ein Eingang
}
void loop(){
digitalWrite(TRIGGER, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER, LOW);// Jetzt fängt die Messung an
dauer = pulseIn(ECHO, HIGH); //Mit dem Befehl „pulseIn“ zählt der Mikrokontroller die Zeit in Mikrosekunden, bis der Schall zum Ultraschallsensor zurückkehrt.
entfernung = (dauer/2) * 0.03432; //Nun berechnet man die Entfernung in Zentimetern. Man teilt zunächst die Zeit durch zwei (Weil man ja nur eine Strecke berechnen möchte und nicht die Strecke hin- und zurück). Den Wert multipliziert man mit der Schallgeschwindigkeit in der Einheit Zentimeter/Mikrosekunde und erhält dann den Wert in Zentimetern.
if (entfernung >= 500 || entfernung <= 0){ //Wenn die gemessene Entfernung über 500cm oder unter 0cm liegt,…
Serial.println("Kein Messwert"); //dann soll der serial monitor ausgeben „Kein Messwert“, weil Messwerte in diesen Bereichen falsch oder ungenau sind.
}
else{ // Ansonsten…
Serial.print(entfernung); //…soll der Wert der Entfernung an den serial monitor hier ausgegeben werden.
Serial.println(" cm"); // Hinter dem Wert der Entfernung soll auch am Serial Monitor die Einheit "cm" angegeben werden.
}
delay(1000); //Das delay von einer Sekunde sorgt in ca. jeder neuen Sekunde für einen neuen Messwert.
}🅿️ Einparkhilfe mit Leuchtband und blinkender LED
Entwickeln Sie eine Einparkhilfe mit Leuchtband L0..L7. Was ist besser, je näher desto mehr LED oder desto weniger?
Erweitern Sie ihre Lösung mit der blinkenden Board-LED, je näher desto schneller blinkt sie, bei der geringsten Entfernung leuchtet sie dauernd.
Verwenden Sie zum Blinken einen Timer-Interrupt.
Lösungsvorschlag
#define trigger PA10
#define echo PC9
#define LED_B PA5 // D13 Led auf dem Board
int dauer=0; // int bei STM sind 32 Bit
int entfernung=0;
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timeruaswahl
void isr_blinken(){
digitalWrite(LED_B,!digitalRead(LED_B));
}
void setup(){
Serial.begin (9600); //Serielle kommunikation starten, damit man sich später die Werte am serial monitor ansehen kann.
pinMode(trigger, OUTPUT); // Trigger-Pin ist ein Ausgang
pinMode(echo, INPUT); // Echo-Pin ist ein Eingang
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(LED_B,OUTPUT); // BoardLED
mytimer.setOverflow(1, HERTZ_FORMAT);
mytimer.attachInterrupt(isr_blinken); //Timer IR aktivieren und Sprung zur ISR
}
#define MAX_ENTFERNUNG 200
void ausgeben(int d){
int ausgabe=0;
int blink=0;
int vergleichswert=MAX_ENTFERNUNG;
while (d < vergleichswert){
ausgabe = ausgabe*2 +1;
//vergleichswert /= 1.5; // type cast, Java würde meckern
vergleichswert = (int) (vergleichswert / 1.5);
blink++;
}
if (blink==0){ // zu weit weg
mytimer.pause(); //Timer stoppen
digitalWrite(LED_B,LOW);
}
else if (blink<=7){
mytimer.setOverflow(blink, HERTZ_FORMAT); //
mytimer.resume(); //Timer starten
}
else{
mytimer.pause(); //Timer stoppen
digitalWrite(LED_B,HIGH);
}
GPIOC->ODR =ausgabe;
}
void loop(){
static int dist=0;
digitalWrite(trigger, HIGH);
delayMicroseconds(10);
digitalWrite(trigger, LOW); // Messung starten
dauer = pulseIn(echo, HIGH);
entfernung = (dauer/2) * 0.03432;
if (entfernung >= 300 || entfernung <= 0){
Serial.println("Kein Messwert");
}
else{
dist = (dist+entfernung)/2;
Serial.printf(" %d cm Mittelwert: %d cm \n",entfernung,dist);
ausgeben(dist);
}
delay(200);
}ToDo: pulseIn() mit Timer nachbauen
Wie kann die Puls-Dauer mit einem Timer gemessen werden?
In der Doku findet sich Frequency_Dutycycle_measurement.ino wie funktioniert das?
Einparkhilfe mit Anzeigenumschaltung
Die Einparkhilfe verwendet für Entfernungen über 16 cm eine zweistellige 7-Segmentanzeige und schaltet bei geringerer Entfernung auf eine Leuchtbandanzeige um. Der entprellte Boardtaster schaltet die Einparkhilfe an und aus. Ausgewertet wird der Tastendruck über einen Interrupt auf die fallende Flanke. Ein Timerinterrupt ruft mit 100 Hz die isr_ausgeben() auf, neben der Ausgabe auf die zwei Anzeigen, bzw. dem Leuchtband wird eine Variable csZaehler (Centi-Sekunden = 100. Sekunden) hochgezählt, mit dieser Variable können Delays vermieden werden.
#define TRIGGER PA10
#define ECHO PC9
int entfernung=0; // entfernung in cm
int csZaehler=0; // Centi-Sekunden
int bcd_7seg[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; // Umrechnung
int leuchtband[]={0b10101010,0b1,0b11,0b111,0b1111,0b11111,0b111111,0b1111111,0b11111111};
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timeruaswahl
enum{RUHE,MESSEN} zustand=RUHE;
void setup(){
pinMode(TRIGGER, OUTPUT); // Trigger-Pin ist ein Ausgang
pinMode(ECHO, INPUT); // Echo-Pin ist ein Eingang
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(PC11,OUTPUT); // Einer
pinMode(PC12,OUTPUT); // Zehner
attachInterrupt (digitalPinToInterrupt (PC13), isr_taster, FALLING);
mytimer.setOverflow(100, HERTZ_FORMAT);
mytimer.attachInterrupt(isr_ausgeben); //Timer IR aktivieren und Sprung zur ISR
mytimer.resume(); //Timer starten
}
void isr_taster(){ // Taster wurde gedrückt
switch(zustand){
case RUHE:
zustand=MESSEN;
break;
case MESSEN:
zustand=RUHE;
}
}
void isr_ausgeben(){ // alle 10ms also 100 Hz
int ausgabe; // Dezimeter
switch(zustand){
case RUHE:
GPIOC->ODR = 0;
break;
case MESSEN:
if(entfernung <= 16){
GPIOC->ODR = leuchtband[entfernung/2];
}
else{
ausgabe = entfernung/10; // Dezimeter
if (csZaehler%2){ // ungerade
GPIOC->ODR = bcd_7seg[ausgabe%10] | (1<<11); // Einer einschalten
}
else{ // gerade
GPIOC->ODR = bcd_7seg[ausgabe/10] | (1<<7) |(1<<12); // Dezimalpunkt und Zehner einschalten
}
}
if(csZaehler%30==0){ // alle 300 ms Messen
messung(); // Messe die Entfernung.
}
}
csZaehler++;
}
void messung(){
int dauer=0; // int bei STM sind 32 Bit
int mess;
digitalWrite(TRIGGER, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER, LOW); // Messung starten
dauer = pulseIn(ECHO, HIGH,20000); // auf 20ms begrenzen für 6m
mess = (dauer/2) * 0.03432;
if (mess>300){
entfernung = 300;
}
else{
entfernung = (entfernung+mess)/2; // Messungen glätten
}
}
void loop(){
}Zustandsdiagramm?
Gerne für isr_taster(), aber dabei isr_ausgeben() richtig ein zu bauen macht irre. Ausweg wäre durch geschickte Unterprogramme die Sache zu erleichtern, aber dabei wird der Code unnötig aufgepumpt?
Wozu überhaupt isr_ausgeben() darstellen, führt ja zu keiner Zustandsänderung.

Bonus: Lösung ohne pulseIn()
Bei größeren Distanzen flackert die Einerstelle, die Ursache liegt in der Messung der Pulslänge die von der ISR aufgerufen wird. Hier eine Lösung ohne pulseIn() und ohne Verzögerung.
Hinweis: Die Funktion micros() gibt die Zeit seit Systemstart in Mikrosekunden zurück, wird hier als Zeitmarkengeber verwendet. Dank PlatformIO ist die Definition von mircos() nur einen Mausklick entfernt:
extern uint32_t micros(void) ;Wie lange dauert es, bis nach Systemstart micros() wieder auf 0 überläuft?
#include <Arduino.h>
#define TRIGGER PA10 // Auslösen einer Messung
#define ECHO PC9 // Signal des Sensors
#define LED_B PA5 // D13 Board-LED
#define TASTER_B PC13 // Board-Taster
const int bcd_7seg[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; // Umrechnung
const int leuchtband[]={0b10101010,0b1,0b11,0b111,0b1111,0b11111,0b111111,0b1111111,0b11111111};
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timeruaswahl
enum zustandstyp{RUHE,MESSEN};
zustandstyp zustand=RUHE;
int entfernung=0; // entfernung in cm
int csZaehler=0; // Centi-Sekunden-Zähler
bool messungLaeuft = false; // Flag zum Synchronisieren
void isr_echo(){ // Messen der Entfernung, Aufruf bei Flankenwechsel
static unsigned long anfang = micros(); // Anfangszeit merken können
int dauer;
int mess;
if (digitalRead(ECHO) == HIGH) { // 0->1 Messung starten
anfang = micros();
messungLaeuft=true;
}
else { // 1->0 Messung stoppen und auswerten
dauer = micros()-anfang;
mess = (dauer/2) * 0.03432;
if (mess>300 || mess<=0){
entfernung = 300;
}
else{
entfernung = (entfernung+mess)/2; // Messungen glätten
}
messungLaeuft=false;
}
}
void isr_taster(){
switch(zustand){
case RUHE:
zustand=MESSEN;
break;
case MESSEN:
zustand=RUHE;
}
}
void ausgeben(){
int ausgabe; // Dezimeter
if(entfernung <= 16){
GPIOC->ODR = leuchtband[entfernung/2];
}
else{
ausgabe = entfernung/10; // Dezimeter
if (csZaehler%2){ // ungerade
GPIOC->ODR = bcd_7seg[ausgabe%10] | (1<<11); // Einer einschalten
}
else{ // gerade
GPIOC->ODR = bcd_7seg[ausgabe/10] | (1<<7) |(1<<12); // Dezimalpunkt und Zehner einschalten
}
}
}
void starteMessung(){ // Messung starten
digitalWrite(TRIGGER, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER, LOW);
}
void isr_ausgeben(){ // alle 10 ms
switch(zustand){
case RUHE:
GPIOC->ODR = 0;
break;
case MESSEN:
ausgeben();
if(!messungLaeuft && csZaehler%30==0){ // alle 300 ms Messung wieder starten
starteMessung();
}
}
csZaehler++;
}
void setup(){
pinMode(TRIGGER, OUTPUT); // TRIGGER-Pin ist ein Ausgang
pinMode(ECHO, INPUT); // ECHO-Pin ist ein Eingang
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(PC11,OUTPUT); // Einer
pinMode(PC12,OUTPUT); // Zehner
pinMode(LED_B,OUTPUT); // Board-LED zum Testen
pinMode(TASTER_B,INPUT); // nicht unbedingt erforderlich
attachInterrupt (digitalPinToInterrupt (TASTER_B), isr_taster, FALLING);
mytimer.setOverflow(100, HERTZ_FORMAT);
mytimer.attachInterrupt(isr_ausgeben); //Timer IR aktivieren und Sprung zur ISR
mytimer.resume(); //Timer starten
attachInterrupt(digitalPinToInterrupt(ECHO),isr_echo,CHANGE); // Aufruf bei Flankenwechsel
}
void loop(){
}Nun habe ich versucht bool messungLaeuft durch zwei Zustände zu ersetzten, dabei musste ich den Echo-Interrupt ein- und ausschalten.
#include <Arduino.h>
#define TRIGGER PA10 // Auslösen einer Messung
#define ECHO PC9 // Signal des Sensors
#define LED_B PA5 // D13 Board-LED
#define TASTER_B PC13 // Board-Taster
const int bcd_7seg[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; // Umrechnung
const int leuchtband[]={0b10101010,0b1,0b11,0b111,0b1111,0b11111,0b111111,0b1111111,0b11111111};
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timeruaswahl
enum zustandstyp{RUHE,MESSEN,MESSENFERTIG};
zustandstyp zustand=RUHE;
int entfernung=0; // entfernung in cm
int csZaehler=0; // Centi-Sekunden-Zähler
void isr_echo(){ // Messen der Entfernung, Aufruf bei Flankenwechsel
static unsigned long anfang = micros(); // Anfangszeit merken können
int dauer;
int mess;
if (digitalRead(ECHO)) { // 0->1 Messung starten
anfang = micros();
}
else { // 1->0 Messung stoppen und auswerten
dauer = micros()-anfang;
mess = (dauer/2) * 0.03432;
if (mess>300 || mess<=0){
entfernung = 300;
}
else{
entfernung = (entfernung+mess)/2; // Messungen glätten
}
zustand=MESSENFERTIG;
}
}
void starteMessung(){ // Messung starten
digitalWrite(TRIGGER, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER, LOW);
}
void isr_taster(){
switch(zustand){
case RUHE:
attachInterrupt(ECHO,ISR_echo,CHANGE); // Aufruf bei Flankenwechsel
starteMessung();
zustand=MESSEN;
break;
case MESSEN:
case MESSENFERTIG:
detachInterrupt(ECHO);
zustand=RUHE;
}
}
void ausgeben(){
int ausgabe; // Dezimeter
if(entfernung <= 16){
GPIOC->ODR = leuchtband[entfernung/2];
}
else{
ausgabe = entfernung/10; // Dezimeter
if (csZaehler%2){ // ungerade
GPIOC->ODR = bcd_7seg[ausgabe%10] | (1<<11); // Einer einschalten
}
else{ // gerade
GPIOC->ODR = bcd_7seg[ausgabe/10] | (1<<7) |(1<<12); // Dezimalpunkt und Zehner einschalten
}
}
}
void isr_ausgeben(){ // alle 10 ms
switch(zustand){
case RUHE:
GPIOC->ODR = 0;
break;
case MESSEN:
ausgeben();
break;
case MESSENFERTIG:
ausgeben();
if(csZaehler%30==0){ // alle 300 ms Messung wieder starten
starteMessung();
zustand=MESSEN;
}
}
csZaehler++;
}
void setup(){
pinMode(TRIGGER, OUTPUT); // TRIGGER-Pin ist ein Ausgang
pinMode(ECHO, INPUT); // ECHO-Pin ist ein Eingang
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(PC11,OUTPUT); // Einer
pinMode(PC12,OUTPUT); // Zehner
pinMode(LED_B,OUTPUT); // Board-LED zum Testen
pinMode(TASTER_B,INPUT); // nicht unbedingt erforderlich
attachInterrupt (digitalPinToInterrupt (TASTER_B), isr_taster, FALLING);
mytimer.setOverflow(100, HERTZ_FORMAT);
mytimer.attachInterrupt(isr_ausgeben); //Timer IR aktivieren und Sprung zur ISR
mytimer.resume(); //Timer starten
}
void loop(){
}Erstellen Sie ein Zustandsdiagramm.
Lösungsvorschlag Zustandsdiagramm

🤯 Bonus/Experiment: Ein Entwurf ohne “Events”
ISRs sind keine echten Events, daher können lustige Probleme auftreten, wenn z.B. im Hauptprogramm und in der ISR auf die selben Ressourcen verändert werden. Wollte das von den SuS fern halten, in dem ich alle Zustandsänderungen nur in Hauptprogramm vornehme und künstlich Zustände NAH und FERN verwende. Hier ein Experiment wie das funktionieren könnte (Würg! Nie wieder!):
#define trigger PA10
#define echo PC9
int entfernung=0; // entfernung in cm
int csZaehler=0; // Centi-Sekunden
bool taster_F=false;
int bcd_7seg[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; // Umrechnung
int leuchtband[]={0b10101010,0b1,0b11,0b111,0b1111,0b11111,0b111111,0b1111111,0b11111111};
static HardwareTimer mytimer = HardwareTimer(TIM2); // Timerinstanz sowie Timerauswahl
enum{RUHE,FERN,NAH} zustand=RUHE;
void setup(){
pinMode(trigger, OUTPUT); // Trigger-Pin ist ein Ausgang
pinMode(echo, INPUT); // Echo-Pin ist ein Eingang
GPIOC->MODER = 0x5555; // PC0..PC7 als Ausgang
pinMode(PC11,OUTPUT); // Einer
pinMode(PC12,OUTPUT); // Zehner
attachInterrupt (digitalPinToInterrupt (PC13), isr_taster, FALLING);
mytimer.setOverflow(100, HERTZ_FORMAT);
mytimer.attachInterrupt(isr_ausgeben); //Timer IR aktivieren und Sprung zur ISR
mytimer.resume(); //Timer starten
}
void isr_taster(){
taster_F=true;
}
bool taster() { // Abfrage Taster-Flag und bei true wieder auf false setzen
if(taster_F){
taster_F=false;
return true;
}
return false;
}
void isr_ausgeben(){
int ausgabe; // Dezimeter
switch(zustand){
case RUHE:
GPIOC->ODR = 0;
break;
case FERN:
ausgabe = entfernung/10; // Dezimeter
if (csZaehler%2){ // ungerade
GPIOC->ODR = bcd_7seg[ausgabe%10] | (1<<11); // Einer einschalten
}
else{ // gerade
GPIOC->ODR = bcd_7seg[ausgabe/10] | (1<<7) |(1<<12); // Dezimalpunkt und
} // Zehner einschalten
break;
case NAH:
GPIOC->ODR = leuchtband[entfernung/2];
}
csZaehler++;
}
void messung(){
int dauer=0; // int bei STM sind 32 Bit
int mess;
digitalWrite(trigger, HIGH);
delayMicroseconds(10);
digitalWrite(trigger, LOW); // Messung starten
dauer = pulseIn(echo, HIGH);
mess = (dauer/2) * 0.03432;
if (mess>300){
entfernung = 300;
}
else{
entfernung = (entfernung+mess)/2; // Messungen glätten
}
}
void loop(){
switch(zustand){
case RUHE:
if(taster()){
zustand = FERN;
}
break;
case FERN:
if(csZaehler%30==0){ // alle 300 ms Messen
messung();
}
if(taster()){ // Tastendruck hat Priorität,
zustand = RUHE; // sonst könnte er übersehen werden
}
else if(entfernung <= 16){ // falls diese Bedingung
zustand = NAH; // auch zutrifft
}
break;
case NAH:
if(csZaehler%30==0){ // alle 300 ms Messen
messung();
}
if(taster()){ // Tastenereignis hat Priorität
zustand = RUHE;
}
else if(entfernung > 16){
zustand=FERN;
}
}
}Versuch den Code so präzise wie möglich in einem Zustandsdiagramm ab zu bilden:
